解 説
技術開発賞受賞について*
中野 政身**
* 平成30年7月4日原稿受付
**東北大学未来科学技術共同研究センター,
〒980-8577宮城県仙台市青葉区片平2-1-1 東北大学産学連携先端材料研究開発センター内
1.はじめに
この度は,「超小型EV向けMR流体ブレーキの開発と実装」に関して,日本フルードパワーシステム学会・技術開発賞という栄えある賞を頂き,大変光栄に思っている.本開発技術は,磁場に反応して粘性が変化する機能性流体であるMR(Magneto-Rheological)流体を活用した車両用MR流体ブレーキの開発に関するもので,従来の油圧・機械式ブレーキの弱点を克服し,摩耗粉が発生せず,低騒音,高速応答性と柔軟な制御性を有しており,今後の自動運転車や電気自動車の全電動化に寄与する,独創的で有用な,将来性のある技術として高く評価されて,受賞に至ったものである.本開発に携わった多くの関係者に御礼を申し上げるとともに,当該賞へのご推薦を賜わった方に感謝申し上げる.本稿では,本開発技術に関して解説する.
2.「超小型EV向けMR流体ブレーキの開発と実装」開発技術の概要
2.1 本技術開発の背景
MR(Magneto-Rheological)流体は,油中に数ミクロンの強磁性体粒子を分散させた懸濁液で,磁場印加により分散粒子が磁気的に分極して鎖状の粒子クラスターやカラム構造を形成することによって数msのオーダーで液体から半固体に相変化する機能性流体である1), 2).磁場印加によって粘性を可変なことから,ダンパ,ブレーキ,クラッチなどの機械要素だけでなく,一般産業用機械,車両,建築,ロボティクス分野などの各種制御システムへの応用なども活発に試みられ,実用化も行なわれてきている3), 4).
一方,車両用のブレーキの分野では,油圧・機械式のディスクブレーキが主流で,油圧によりブレーキキャリパーがブレーキパッドをディスクロータに挟みつけることによって摩擦ブレーキ力を発生する.そのため,摩耗粉やブレーキ音・振動の発生,ブレーキパッドやディスクの摩耗によるメンテナンスの必要性,油圧式駆動による応答性や制御性の限界など,諸課題を包含しているのが現状である.
本技術開発では,2020年代に普及するとされている自動運転車や自動車の全電動化への対応と摩耗粉やブレーキ音の発生しない環境に配慮した車両用ブレーキとして,機械的摩擦に頼らないMR流体を用いた新発想の「MR流体ブレーキ」を設計・開発している5), 6).
2.2 車両用MR流体ブレーキの動作原理と解析・設計
開発したMR流体ブレーキ(図1(a))は,厚さ1.0 mmの車両に固定された円盤(2枚)と,ハブベアリングと一緒に回転する円盤(3枚)が交互に配置された円盤間間隙0.5mmの多層円盤間にMR流体を充填した構造をとっている.多層円盤外周に配置された円環状電磁コイル(線径0.8 mm, 巻数260 turns)に電流を流すと固定電磁ヨークに磁界が発生して多層円盤間のMR流体に磁界が印加され,回転円盤にMR流体のせん断力が働きブレーキとして作動する.図1(b)の作動原理に示すように,多層円盤に垂直に磁界が印加されるため,MR流体中の分散粒子は磁気分極し互いに引き付け合い円盤に垂直な磁界方向に鎖状のクラスターやカラム構造を形成して,固定円盤と回転円盤とに固着した鎖状粒子クラスターやカラムがせん断変形を受け円盤間のほぼ中心部で崩壊してはつながる現象を繰り返すことで,回転円盤に抵抗力が発生してブレーキ機能が働く.このような作動原理のため,機械的摩擦ブレーキと異なり摩耗粉が発生せず静粛で,環境負荷軽減に貢献する.また,MR流体が磁場に数msのオーダーで反応することから,磁場印加装置を適切に設計することによって俊敏かつ安定したブレーキ制御が期待できる.開発したMR流体ブレーキの外観を図2に示す.本MR流体ブレーキを搭載する超小型EVのオリジナルの12 in.のホイール内のスペースに装着できるように,MR流体ブレーキのサイズは外径φ244 mm,幅約54 mmとしている.従来の油圧駆動式ディスクブレーキのように軸方向に動く駆動メカが不用なため,比較的シンプルな外観となっている.
MR流体ブレーキの設計は,電磁場解析ソフトの電磁場解析を援用して多層円盤間のMR流体へ効果的に磁場が印加されるようにブレーキトルクを予測しながら形状を最適化して行なっている.超小型EVの一輪あたりの必要ブレーキトルクは160 Nmであるので,電磁コイルにI=2.0 Aの電流を流した際に目標トルク160 Nm以上が得られるように電磁コイルも含めてMR流体ブレーキを設計している.最大設計コイル電流I=2.0 Aを印加した際の磁場解析結果を図3に示す.円盤間のMR流体層に印加される磁束密度Bは約0.7 Tであり,理論トルクは約178 Nm (I = 2.0 A) と見積もられ,目標トルク160 Nmを十分に満たしている.
2.3 開発したMR流体ブレーキの制動トルクの基本特性
図3には,サーボモータとトルク変換器からなるMR流体ブレーキの基本的な制動トルク特性計測装置を用いて測定した回転数N=100rpm時のMR流体ブレーキの制動トルクの基本特性を示す.電磁コイルへの印加電流Iの目標値を矩形波状(0Aと目標I A間の5秒間の立ち上がり,立下り波形)に与えて,それに対する制動トルクの時間応答を測定した(図4(a)).印加電流Iが大きくなるに伴い制動トルクも増大し,その立ち上がりの時定数は30~40msで,立下り時には17~20msと比較的速い応答を呈する.また,計測した定常的な制動トルクは(図4(b)),印加電流Iにほぼ比例して増大し,I=2.0 A時に約180 Nmの制動トルクが得られ,設計時の予測値の変化にほぼ一致している.
2.4 超小型EVへのMR流体ブレーキの四輪実装と実車試験
開発したMR流体ブレーキを超小型EVの四輪の12inホイール内に装着している(図5).MR流体ブレーキを活用したユニークなブレーキシステムとして,運転者が要求するブレーキ力(ブレーキペダルのストローク)を電気信号に変換して各車輪のMR流体ブレーキへ供給してブレーキを掛ける四輪BBW(Brake by Wire)ブレーキシステムを構築している.このシステムでは,図7(a)に示すように,電子制御装置(ECU)を用いてMR流体ブレーキへの入力電圧(電流)を直接コントロールしているため,あらかじめ設定したブレーキの効力の三つのパターンからユーザーが自分の好みのブレーキフィーリングを選択できる機能を設けている.MR流体ブレーキを搭載した超小型EVの実車走行試験を実施した結果,MR流体ブレーキはブレーキ力が安定しており,応答性についても従来の摩擦ブレーキに比して違和感なく操作が可能であった.図6には,MR流体ブレーキを装着した超小型EVが勾配30%の坂道で一時停止している様子を示す.MR流体ブレーキはこのような急勾配の坂道でも停止できるほど十分な制動トルクを発生している.また,ブレーキフィーリング制御の結果として,ペダル・ストローク~ブレーキトルク測定結果の一例を図7に示す.これは欧州ラグジュアリ車のブレーキフィーリングを模擬した場合で,ペダル・ストロークが大きくなるにつれてブレーキトルクが徐々に増加しストローク終盤で急激に増大するように設定してある.ブレーキトルクの実測値が設定値に良好に追従しており,MR流体ブレーキが柔軟で高い制御性を有していることを実証している.さらに,図8には,一般に車両用ブレーキに適用されるABS(Anti-lock Brake System)をMR流体ブレーキを搭載した超小型EVに適用し,低摩擦路(μ0.1:アイスバーン相当)でのABS制御走行試験の様子を示す.写真において,車輪マーカー(白点)の位置が前後輪で異なることから,ABS制御が視覚的にも働いていることがわかる.また,BBWブレーキシステムを採用しているためブレーキペダルへの反力変動等がなく,MR流体ブレーキの高速応答性のためABS制御が滑らかで効果的に発揮されている.
3.本開発技術の特長と社会的評価
開発したMR流体ブレーキの車両用ブレーキの分野における主な技術的成果をまとめると下記のようになり,高速応答性や柔軟で高度な制御性を活かした種々のブレーキシステムの構築が可能となり,将来性が見込める.
(1)摩耗粉が発生しないため,屋内でもクリーンである.
(2)ブレーキ音や振動が発生せず,快適で安心である.
(3)ブレーキの応答性が速く(30~40ms, 40 Hz程度),敏速な反応が可能である.
(4)ブレーキの制御性が良く(直接電気的に制御可能),柔軟なブレーキ制御かつ安定した操縦性が確保できる.
また,本開発技術の内容は,下記のとおり報道機関や自動車関係雑誌でもホットな技術開発として多数回取り上げられており,新発想・新技術のブレーキとして好評を博している.
(1) 2016.8.12 日刊工業新聞:MR流体ブレーキ開発!曙ブレーキ,東北大共同 2020年実用化目指す.
(2) 2016.8.10 Car Watch : 磁性体のせん断応力でブレーキ力を生む「MR流体ブレーキ」開発.
http://car.watch.impress.co.jp/docs/news/1014784.html
(3) 2016.8.10 オーテックワン:摩擦に頼らない新発想の「MR流体ブレーキ」開発.
http://autoc-one.jp/news/2846353/
(4) 2016.8.15 Motor Cars:曙ブレーキ工業,摩擦に頼らない「MR流体ブレーキ」を開発.
http://motorcars.jp/akebono-brake-industry-developed-the-mr-fluid-brake-that-does-not-rely-on-friction20160815
(5) 2016.10 日経Automotive,クルマの動きが遅すぎる,自動運転・電動化で激変するシャシー勢力図.Part 2, まず冗長化,次に速く軽く - MR流体ブレーキで超高速制動, pp.38-51,(2016年10月号).
(6) 2017.10.5 NHK World TV Live, NEWSLINE,曙ブレーキ工業㈱と東北大学が共同で開発した小型EV用の車両用MR流体ブレーキが,"Changing Parts"として取り上げられ放映された.
4.まとめ
開発した車両用MR流体ブレーキの基本的なブレーキ特性を把握するとともに,スマートモビリティの一つとして期待されている超小型EVの四輪に搭載し走行試験を実施することにより,十分なブレーキ性能とブレーキフィーリング制御及びABS制御などの適用など高速応答性と柔軟で高い制御性があることを実証している.この試験車両での実証から,従来の摩擦ブレーキの弱点である摩耗粉やブレーキ音・振動はもちろんメンテナンス性等の改善,高速応答性,高い制御性,車両の全電動化への寄与等で,開発したMR流体ブレーキはユーザーへ新しい価値を提供できるものとして期待できる.
本技術開発は,曙ブレーキ工業㈱と東北大学中野政身教授との産学共同研究の成果であり,2015年3月に試作品を完成させている.現在は,スマートモビリティに適合したスマートブレーキとして,2020年の実用化を目指し,試験(実走・台上)と改良を重ねている.
参考文献
Rabinow, J.:The Magnetic Fluid Clutch, AIEE Transactions, Vol.67, pp.1308-1315 (1948)
Nakano, M., Yamamoto, H., Jolly, M.R.: Dynamic Viscoelasticity of a Magnetorheological Fluid in Oscillatory Slit Flow, Int. J. of Modern Physics B, Vol.13, No.14,15&16, pp.2068-2076 (1999)
中野政身:MR流体アクチュエータ,未来型アクチュエータ材料・デバイス,シーエムシー,pp.257-268(2006)
中野政身:機能性流体の研究開発と実用化の動向,フルードパワーシステム,Vo.47, No.6, pp.265-271 (2016)
中野政身,古川仁,辻道善治:超小型EV向けMR流体ブレーキの開発,フルードパワーシステム,Vol.47, No.6, pp.275-278 (2016)
中野政身,戸塚厚,田口修,尾高成也,古川仁,道辻善治:超小型EV向けMR流体ブレーキの開発と実装,日本フルードパワーシステム学会・平成29年春季フルードパワーシステム講演会講演論文集,pp.81-83 (2017)
著者紹介
 |
なかの まさみ
中野 政身 君
1982年早稲田大学大学院機械工学専攻博士後期課程修了.1981年早稲田大学助手,1982年山形大学助手,助教授を経て,1997年同教授,2008年東北大学教授流体科学研究所,2018年東北大学教授未来科学技術共同研究センター,現在に至る.機能性流体,流体関連振動・騒音,振動制御などに関わるスマート流体制御システム工学に従事.日本フルードパワーシステム学会(理事),日本機械学会(フェロー),計測自動制御学会などの会員.工学博士.
E-mail: masami.nakano.b2(at)tohoku.ac.jp
URL: http://www.masc.tohoku.ac.jp/projects/index.htm |
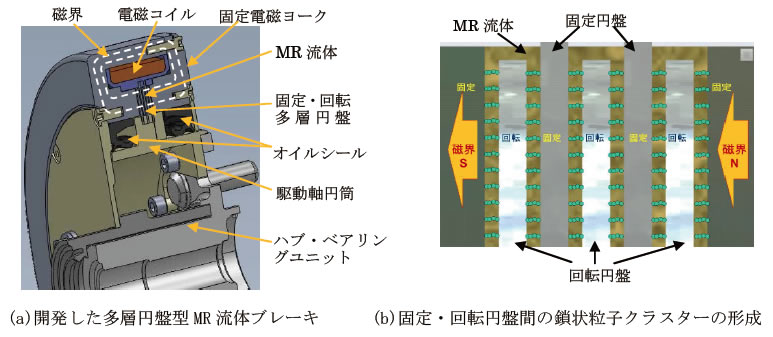
図1 開発した車両用MR流体ブレーキの構造と作動原理
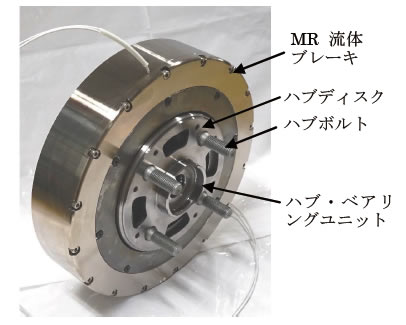
図2 開発した車両用MR流体ブレーキの外観
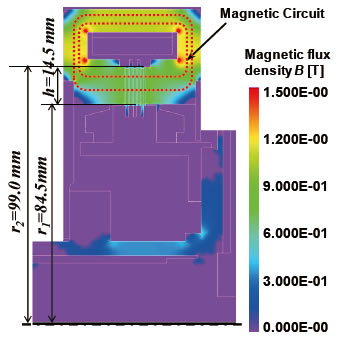
図3 MR流体ブレーキの磁場解析結果(I=2.0 A)
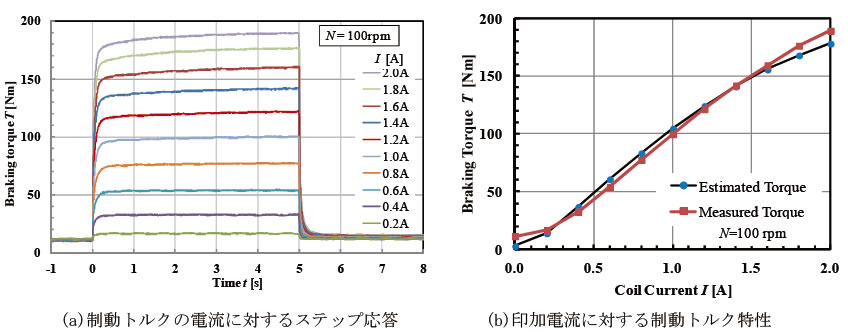
図4 開発したMR流体ブレーキの制動トルクの基本特性

図5 MR流体ブレーキを装着した超小型EV(左)とその車輪(右)

図6 MR流体ブレーキを装着した超小型EVが勾配30%坂道で一時停止している様子
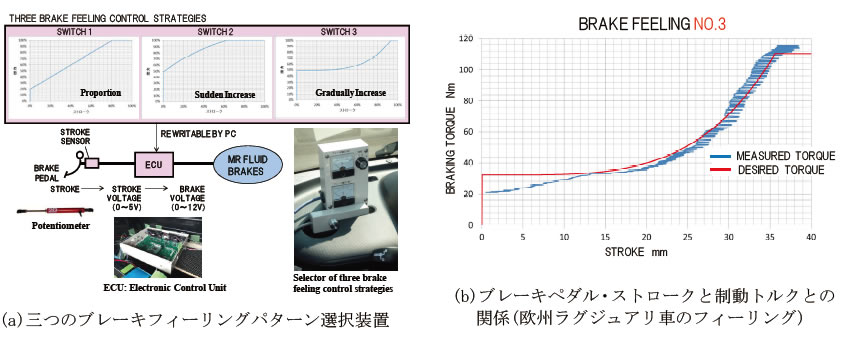
図7 三つのブレーキフィーリングパターンが選択できる四輪MR流体ブレーキシステム
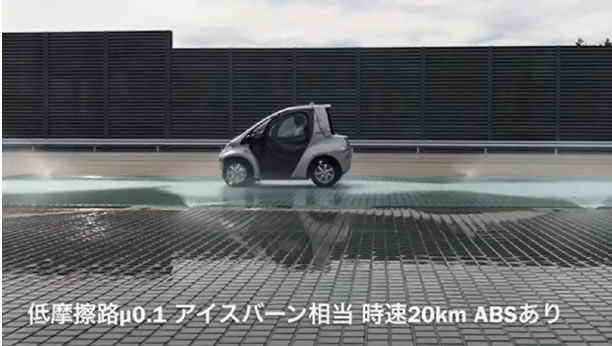
図8 低摩擦路(μ0.1:アイスバーン相当)でのABS制御走行試験の様子
(ABS制御の効果により車輪マーカーの位置が前後輪で異なる)