
いしだ やすまさ
石田 靖昌 君
2016年東京工業大学制御システム工学科卒業.2018年同大学大学院工学院機械系修士課程修了.日本フルードパワーシステム学会などの会員.
E-mail: yuioayuioa(at)gmail.com
解 説
SMC高田賞について*
石田 靖昌**
* 平成30年8月20日原稿受付
** 東京工業大学大学院工学院機械系,〒226-8503 神奈川県横浜市緑区長津田町4259
1.はじめに
この度は,栄誉ある日本フルードパワーシステム学会 SMC 高田賞を賜り,誠に光栄である.受賞論文「ピンチ型空気圧サーボバルブ」の共著者である東京工業大学の只野耕太郎准教授をはじめ,本研究にあたりお世話になった皆様に深く感謝申し上げる.本稿では,受賞対象論文の研究経緯と概要を紹介する.
2.研究の背景と目的
当研究の発端は私が在籍していた東京工業大学の只野研究室で研究を行っていた,空気圧駆動の手術ロボットシステム1)にある.ロボットシステムのような多自由度システムにおいては多数のサーボバルブを使用する.現在一般に広く使用されているサーボバルブはノズルフラッパ型サーボバルブとスプール型サーボバルブに大別できる.ノズルフラッパ型サーボバルブは構造上,常時大気にリリースがあるため空気の消費量が多い.一方でスプール型サーボバルブはノズルフラッパ型サーボバルブに比べ空気の消費量は少ないがスプールの摺動部からの漏れによる損失がある.サーボバルブを多数使用する場合,空気の損失が大きいため大型のコンプレッサが必要となり,システム全体の小型化の妨げになるとともに大きな騒音や振動の原因となる.特に手術ロボットシステムでは手術室に大きな騒音や振動のするコンプレッサを持ち込む事は難しく,システム全体の空気の消費量の削減は大きな課題である.
これまで,漏れのないバルブとしては,振動駆動型のポペットを利用したバルブの研究 2)~4)やチューブの屈曲を利用したサーボバルブの研究5)も行われているが,前者は正確な流量制御が難しく,後者は応答性が不十分なため精密な動作が要求されるロボットシステムには適していない.そこでロボット制御に適した漏れの無い空気圧サーボバルブの実現を目的としてピンチ型空気圧サーボバルブの開発に至った.
3.ピンチ型空気圧サーボバルブ
本研究で開発したバルブの外観を図1に示す.バルブは空気圧配管用のポリウレタンチューブ,サーボモータ,エンコーダ,チューブを閉塞させるカム機構部,モータと機構部を保持する樹脂製の治具で構成される.運動特性と応答性に優れている点からカム機構を採用している.ゼロ点の調整は図1に示す側面の調整ねじによって行う.図2にカムによる流量制御機構のモデル図を示す.ローラのカムフォロワを介しチューブを閉塞している.カムの回転角度に応じてチューブの閉塞量を変化させて流量を制御する.回転方向により供給,排気どちらかのポートのみの流量を制御する.図3にばねを用いたノーマルクローズ機構のモデル図を示す.楕円形状のカムが回転した際にばねが押し縮められ,ばねの復元力によりカムが中立位置に戻る方向に力が働くことでノーマルクローズを実現している.図4に機構部全体の構造図を示す.4ポートを実現するためにカムシャフトには流量制御用の2つのカムとノーマルクローズ用のカムを持つ.供給,排気ポートを左右に分けて配管の接続を容易化させるために,流量制御用の2つのカムは同様の形状で180°位相をずらした配置になっている.カムシャフトは一体構造であり,モータとはダイレクトで接続して,回転角度制御により流量制御を行っている.
4.バルブの流量特性と応答性
まず,バルブの流量特性を調べるためにカム回転角に対する有効断面積の計測を行った.有効断面積の計測は等温化圧力容器を用いて容器内の圧力変化から行っている6).図5にカム回転角と有効断面積の関係を示す.2つのグラフはそれぞれ図1の制御ポートに対応している.漏れに関しては閉じた状態である0°においてポート①の場合最大で定格流量の1.7%,ポート②の場合1.1%であった.参考文献1)の手術ロボットシステムで用いられている市販のスプール型サーボバルブと比べると低格流量に対する漏れ率は同等であり,漏れ量は10分の1以下である.開発したサーボバルブを用いることで空気の消費量の低減ができることを確認した.
さらにバルブの応答性を調べるためにカム角度制御の周波数応答を計測した.カム角度の目標値は最大回転角±80°の25%と50%にあたる,角度振幅20°と40°の正弦波とした.角度制御はPID制御にばね力補償のフィードフォワードを加えて行っている.図6に結果を示す.2つのボード線図よりバンド幅は角度振幅20°のときは50~60Hz,40°のときは40~50Hzであるが位相遅れが90°を大幅に上回っており,目標値に対する追従は30Hz程度までであることを確認した.
5.バルブを用いたシリンダの位置制御
開発したバルブを用いてシリンダの位置制御実験を行った.シリンダの位置目標値は手術ロボットなど精密な動作を想定して,振幅3 mmで周波数が1 Hzと0.1 Hzの2通りの正弦波で実験を行った.図7に実験結果を示す.グラフにおいてシリンダの位置,駆動力,カム角度では実線が実測値,破線が目標値を示している.圧力は実線がP2,破線がP1を示している.グラフより位置応答はなめらかで良好な追従を確認し,バルブとしての有用性を示せた.
6.おわりに
本稿では受賞論文「ピンチ型空気圧サーボバルブ」の研究経緯と概要を紹介した.受賞論文では漏れの無いサーボバルブを目的としてカムを用いた閉塞機構を持つ,4ポートのピンチ型空気圧サーボバルブの開発し,その有用性を示した.今後は実用化に向けて耐久性や個体差の有無などの検討を進めていければよいと考えている.
参考文献
K. Tadano and K. Kawashima:Development of a Master-Slave System with Force-Sensing Abilities using Pneumatic Actuators for Laparoscopic Surgery. Advanced Robotics,vol.24,issue 12,pp.1763-1783.(2010)
S. Uehara and S. Hirai:Unconstrained Vibrational Pneumatic Valves for Miniaturized Proportional Control Devices, Proceeding of 9th International Conference on Mechatronics Technology (2005)
T. Akagi, S. Dohta and S. Katayama:Development of Small-Sized Flexible Pneumatic Valve Using Vibration Motor and Its Application for Wearable Actuator, 15th International conference on Mechatronics and Machine Vision in Practice pp441- 446 (2008)
D. Hirooka, K. Suzumori, T. Kanda:Flow control valve for pneumatic actuators using particle excitation by PZT vibrator, Sensors and Actuators A, Physical 155, pp285-289 (2009)
A. Ono, T. Akagi, S. Dohta and A. Nasir:Improvement of Low-cost Wearable Servo Valve Using Buckled Tube, Proceedings of the 9th JFPS International Symposium on Fluid Power, Matsue, pp669-674 (2014)
香川 利春,川嶋 健嗣,藤田 壽憲,田中 豊,榊 和敏 :等温化圧力容器を用いた有効断面積の計測法,油圧と空気圧 第26巻 第1号,pp. 76-81 (1995)
著者紹介
|
いしだ やすまさ 石田 靖昌 君 2016年東京工業大学制御システム工学科卒業.2018年同大学大学院工学院機械系修士課程修了.日本フルードパワーシステム学会などの会員. |
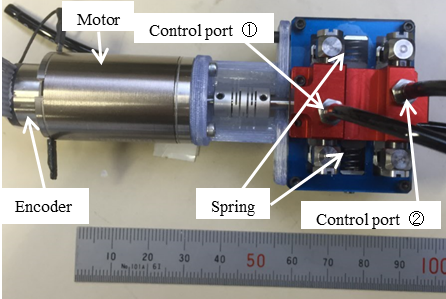
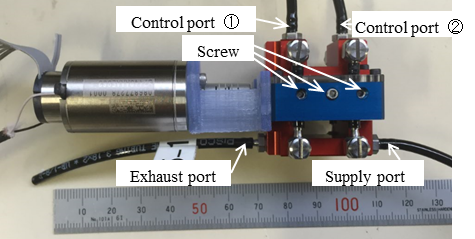
(a)上面図 (b)側面図
図1 開発したバルブの外観
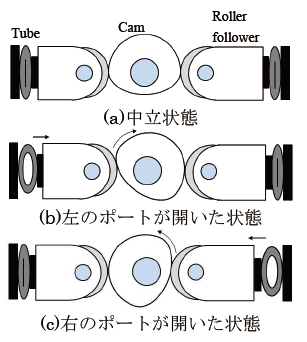
図2 流量制御機構
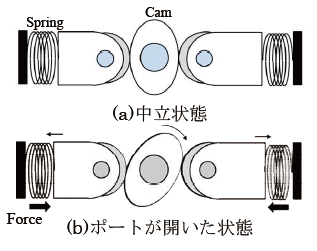
図3 ノーマルクローズ機構
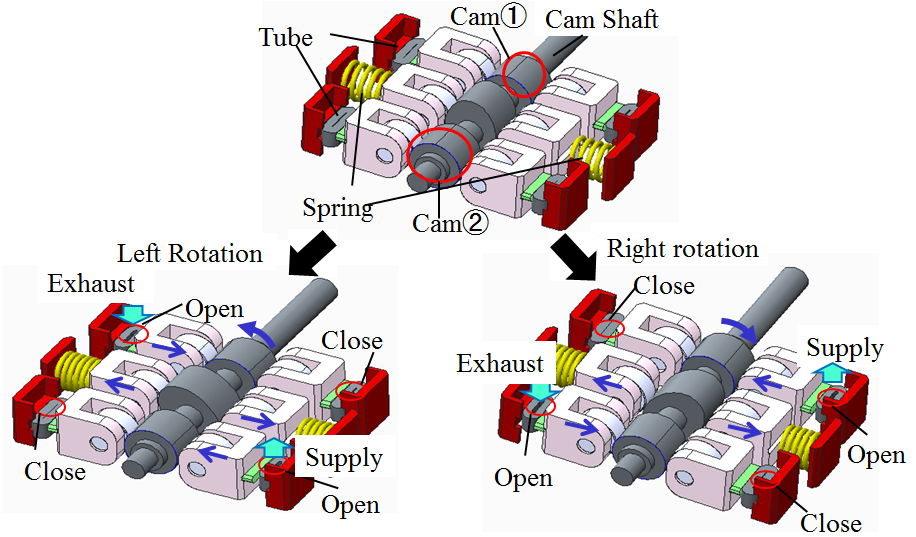
図4 全体の内部構造
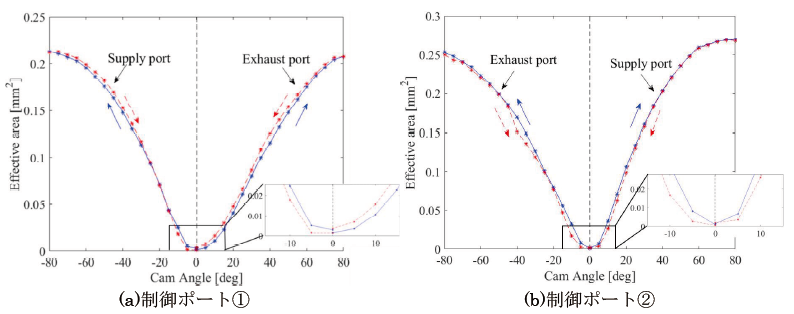
図5 流量特性
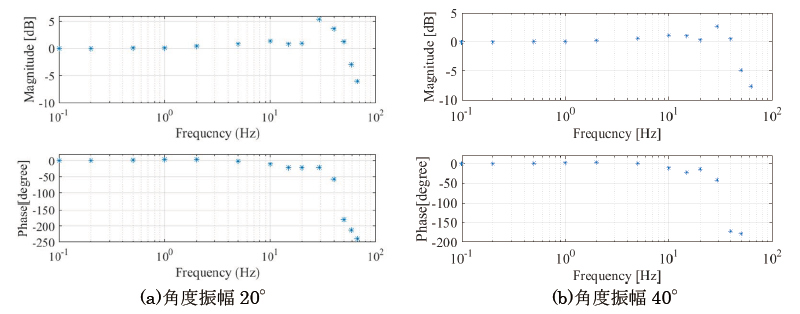
図6 周波数応答
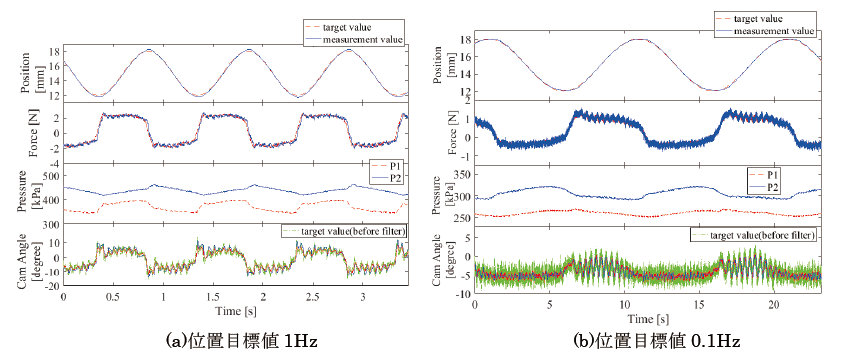
図7 シリンダの位置制御における応答