1.はじめに
この度は,栄えあるSMC高田賞をいただき,日本フルードパワーシステム学会の関係者各位に,心より御礼申し上げる.掲載論文の「感覚フィードバック機能を備えた無動力型空気式義手の開発」が,“新たな無動力義手が提案され,今後の発展が期待される”として,顕彰対象となった.本稿では,その無動力型空気式義手(特許出願済)1)について解説する.
2.研究背景および研究目的
従来の筋電義手は,高い装飾性と把持機能を有するものの,重量が大きくコストが高いという問題があった.それらの問題を解決するため,金属ではなく樹脂を用いた義手が提案されている2-6).これらの義手は,近年,普及してきている3Dプリンタを利用して製作されるため,従来の筋電義手よりも軽量・安価であり,そのうえ,高いデザイン性を有している.しかしながら,“筋電義手”ゆえに,指関節にある電動アクチュエータを駆動するためには,電気エネルギーが必要である.それは,内蔵の重量の大きなバッテリーから供給されるが,義手の使用時間を考えるとバッテリー等の電子部品の小型化による筋電義手の軽量化は容易ではないと考えられる.また,筋電義手は一般に,操作訓練が必要となるほど操作が困難である.そこで本研究においては,(1) 非電動,(2) 軽量・安価,(3) 容易な操作,の3点に重点を置いた新しいタイプの義手の提案により,社会のために貢献することを目的としている.
3.無動力型空気式義手の特長
義手の動作原理を図1に示す.本義手は,義手使用者自身の前腕を回転させる動作(右前腕の場合,時計回りに回転させることを回外動作,その反対を回内動作という)を利用して,圧縮空気を生成し,義手を駆動するものである.非電動な無動力システムであり,電気エネルギーはもとより,空気圧システムに必要なコンプレッサなどの外部動力源も不要である.使用者が回外動作を行うと,使用者の断端に設置されているホルダーとともに,円筒リブカムが回転する.この円筒リブカムにより,ホルダーの回転運動が直線運動へ変換され,リブに接触している小型ポンプのピストンロッドが押し込まれることによって,圧縮空気が生成される.圧縮空気は,ウレタンチューブを介して義手の指関節にある,電動アクチュエータよりも出力/重量比が高く軽量な,ベローズアクチュエータに送られ,指関節が屈曲する.この軽量な空気圧アクチュエータであるベローズを採用することにより,義手の重量は,574 [g]と比較的軽量なものとなっている.また,シンプルな義手構造から,低コスト化が可能となる.本義手の指の屈曲角度または把持力は,ホルダーの回外角度により決まるため,筋電義手のような操作訓練なしに,使用することが可能である.義手の外観および取付例を図2に,仕様を表1に示す.
4.無動力型空気式義手の性能
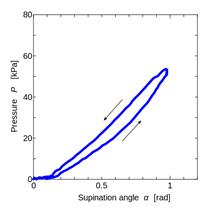
本義手の負荷時の把持力特性を図3に示す.同図より,各屈曲角度において,ホルダーの回外角度αがベローズ圧力P,すなわち把持力に比例していることがわかる.ホルダーの回外角度αにより,把持力がおのずと決まるため,容易な義手操作が可能となる.つぎに,無負荷時の指関節の屈曲角度特性を図4に示す.同図では,ホルダーの回外角度αにより,屈曲角度θ(ベローズ圧力)が比例していることから,ホルダーの回外角度により,屈曲角度の調整が可能である.そして,指先速度特性を図5に示す.同図は,ホルダーの回外角速度ωと指先合成速度vの関係である.これより,本義手は一般的な筋電義手の約6倍の指先速度を有する結果となり,対象物を素早く把持/解放することが可能となる.さらに,本義手には,無動力な感覚フィードバック機能を付加することによって,柔軟物を含む幅広い対象物の把持を実現している.その様子を図6に示す.
5.おわりに
本稿では,新しいタイプの義手である,無動力型空気式義手について解説した.本義手はプロトタイプであり,解決しなければならない課題は多々ある.今後も継続して研究を行い,実用化を目指す.
参考文献
1) 西川弘太郎,平田健太郎,高岩昌弘: 感覚フィードバック機能を備えた無動力型空気式義手の開発,日本フルードパワーシステム学会論文集,Vol.49,No.2,p.56-63 (2018)
2) Open Bionics: Ada Hand Kit, http://www.openbionics.com/
3) 吉川雅博,田口裕也,阪本真,山中俊治,松本吉央,小笠原司,河島則天: 機能性とデザイン性を考慮した軽量・低コストの対向3指義手,日本ロボット学会誌,Vol. 32,No. 5,p. 456-463(2014)
4) ダイヤ工業株式会社: Finch, https://www.daiyak.co.jp/
5) Megusurinoki: 世界も注目する筋電義手「handiii」,製品化に向けた新モデルとは?(後編),https://nikkomaple.net/
6) 吉川雅博,佐藤諒,小川和徳,小笠原司,山中俊治,河島則天: 3Dプリンタで作る2種の電動義手,日本機械学会ロボティクス・メカトロニクス講演会講演概要集,Vol. 2015,p. 2A2-I10⑴-2A2-I10⑶(2015)
著者紹介
 にしかわこうたろう
にしかわこうたろう
西川弘太郎 君
2004年松江工業高等専門学校専攻科生産・建設システム工学専攻修了.同年,(株)カワサキプレシジョンマシナリ(現・川崎重工業(株))入社,2008年津山工業高等専門学校教育研究支援センター技術職員,2014年同技術専門職員,同年,岡山大学大学院自然科学研究科産業創成工学専攻入学(社会人),2016年津山工業高等専門学校技術部技術専門職員,2018年岡山大学大学院自然科学研究科産業創成工学専攻修了,同年津山工業高等専門学校総合理工学科機械システム系助教,2019年同講師,現在に至る.空気圧サーボ系を用いた人間支援型ロボットの研究に従事.日本フルードパワーシステム学会,日本機械学会の会員.博士(工学)・技術士(機械部門).
E-mail: nisikawa(at)tsuyama-ct.ac.jp
![]()
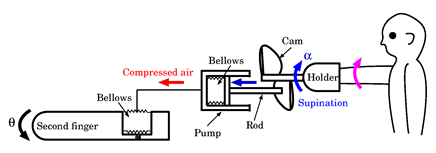
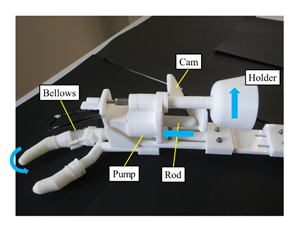
図1 無動力型空気式義手の動作原理
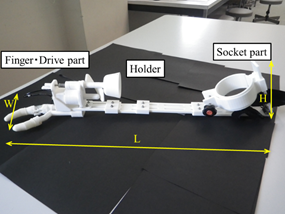
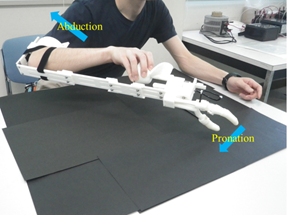
図2 無動力型空気式義手の外観および取付例
表1 無動力型空気式義手の仕様
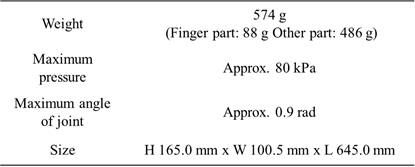
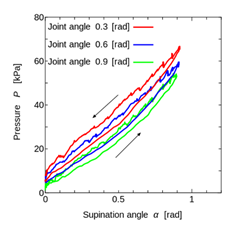
図3 負荷時の把持力特性
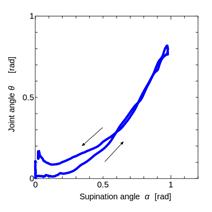
(a) 回外角度とベローズ圧力 (b) 回外角度と屈曲角度
図4 無負荷時の屈曲角度特性
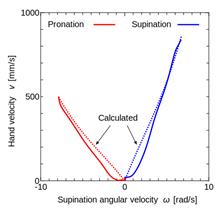
図5 指先速度特性


(a) ペットボトル(280ml) (b) 消しゴム


(c) ゴムボール (d) 紙コップ

(e) パウチゼリー
図6 把持実験の様子