1.はじめに
この度は2019年度通常総会において、本学会より名誉あるSMC高田賞を賜り,恐縮するとともに光栄に感じている.受賞論文「流路に直交方向の加振を利用した油圧微粒子励振型制御弁の試作と評価」の研究では,本論文の共著者である東京工業大学の鈴森康一教授をはじめ,多くの方々にご協力いただいた.ご協力いただいた関係者の皆様には,この場を借りて感謝申し上げる.本稿では受賞論文の研究概要について紹介する.
2.研究背景
災害現場などの悪環境で作業を行うロボットのアクチュエータには,高い出力や外部環境からの衝撃に対する耐性の高さが要求される.そのため,これらに優れた油圧アクチュエータを用いたロボットが研究されている1)-3).これらのロボットの駆動には小型化に適した2段形サーボ弁が用いられることが多い.しかし,多数の自由度を制御する必要があるロボットには,高価かつ常時流体のエネルギーを消費するという小型の2段形サーボ弁の特徴は欠点となる.
著者らの研究グループは,空気圧用に開発された流量制御弁である微粒子励振型制御弁を油圧に適用し,上記の欠点を改善した小型の油圧制御弁を開発している4).図1にHirookaらが開発した従来の空気圧用微粒子励振型制御弁の動作原理を示す5).制御弁には複数のオリフィスが配置されたオリフィス板があり,これらのオリフィスは弁内に封入された微粒子で開け閉めされる.微粒子がオリフィスを塞ぐ力には,圧力が用いられ,圧力が供給されると弁内の微粒子はオリフィスに吸い寄せられて塞ぐ.微粒子がオリフィスから離れる力には,圧電素子の加振が用いられる.交流電圧が印可された圧電素子は振動するが、この振動周波数をオリフィス板が共振する周波数と一致させると,管壁を節,オリフィス板中央を腹として通常より大きな振幅で振動する.微粒子はこの振動から慣性を得て,オリフィスから飛び跳ねる.オリフィスの開口数はオリフィス板の振幅で可変であり,これにより流量が制御される.
このように動作原理は単純かつ小型化に有利であり,非動作時に漏れの発生しない構造から,従来の2段形サーボ弁とは異なる特徴を有した制御弁となることが期待される.しかし,油圧化には大きく3つの課題がある.作動流体の密度の増加,作動流体の粘度の上昇,動作圧力の上昇である.受賞論文では,作動流体の粘度に注目し,高い粘度の作動流体中で動作する構造を検討した.
3.閉口時に微粒子へ作用する力
図2に従来の構造におけるオリフィス上の微粒子に作用する力を示す.微粒子は圧力によりオリフィスに押し付けられており,オリフィスから離れるためには,その押し付け力FP以上の慣性が必要である.加振されたオリフィス上の微粒子の慣性FIVは微粒子の質量とオリフィスの加速度の積で得られる.制御弁内に封入可能な微粒子の大きさは限られるため,微粒子の慣性増加にはオリフィスの加速度増加が用いられる.加振された微粒子には流体からの抗力FDVが発生するが,その大きさは速度の2乗に比例する.そのため,オリフィス板の加速度を増加させると,微粒子に作用する流体からの抗力も増加する.従来の構造では抗力は微粒子をオリフィス上に押し付ける力として作用する.作動流体の粘度が増加するほど,この抗力は増加し,微粒子の移動にはさらに大きな慣性が要求される.粘度による抗力の影響が大きくなった結果,高粘度の作動流体では動作しない.
高粘度の作動流体で動作可能な振動として,受賞論文では図3に示す振動モードを採用した.この振動モードでは,微粒子がオリフィスに押し付けられる力と直交する方向にオリフィスを振動させる.微粒子がオリフィスから離れる条件は,微粒子と弁座の接点を回転中心としたモーメントの釣り合いより式(1)で表される.
ここで,FIHは微粒子の慣性,FPは圧力による微粒子をオリフィスに押し付ける力,FDHは作動流体から微粒子への抗力,qCは微粒子と弁座の接触角度,vは微粒子の速度を示す.微粒子と弁座の接触角度に注目すると,接触角度qCが小さくなるほど,開口に必要な微粒子の慣性は低下する.すなわち,開口に必要なオリフィスの加速度は低下し,このとき微粒子に作用する抗力も低下する.さらに抗力が作用する方向は微粒子をオリフィスに押し付ける方向と直交しており,微粒子をオリフィス上に留める力として作用しないという利点がある.
4.開口後に微粒子へ作用する力
式(1)から微粒子と弁座の接触角度が小さいほど,微粒子はオリフィスから離れやすいことが示された.しかし,採用した振動モードではオリフィスから離れた後の微粒子の挙動を考慮すると,異なる結果が得られる.
図4に示すように,微粒子がオリフィスから離れた後,弁座に沿って移動すると仮定する.この間,微粒子は弁座から力を受け続けるため,オリフィスから遠ざかりやすくなる.このとき微粒子に与えられる力積は,微粒子が弁座から受ける垂直抗力FNと微粒子が弁座の上端まで弁座に沿って移動する時間tocの積から求められる.垂直抗力FNと移動時間tocはそれぞれ式(2)から式(4)より求められる.
ここで,FTHは微粒子に作用する弁座の面に対して水平方向の合力,mは微粒子の質量,HUは微粒子と弁座の接触箇所から弁座の上端までの高さを示す.移動時間は短時間であるため,微粒子に作用するそれぞれの力は一定とした.
作動流体から微粒子に作用する抗力は,圧力による押し付け力よりも十分小さく無視できるとして,微粒子に与えられる力積を求めると,接触角度が大きいほど微粒子に与えられる力積は大きくなる.流量の発生には微粒子が十分にオリフィスから遠ざかる必要があるため,力積が大きくなる接触角度ほど開口に有利となる.この結果は式(1)から得られる接触角度と開口の関係とは反対である.接触角度は弁座のテーパ角qtによって変化するため,開口に必要な加振力を最小化する最適な弁座のテーパ角が存在する.
5.試作機を用いた性能評価
開口に最適な弁座のテーパ角を求めるため,テーパ角の異なる5種の弁座を試作し,評価した.作動流体として動粘度1 mm2/sのシリコーンオイルを用いた.弁座を収める制御弁の構造および有限要素法による振動の様子を図5および図6に示す.流路に直交する方向へ弁座を加振させるため,弁座の形状は円筒状の流路を片持ち梁のようにたわみ振動させる構造とした.
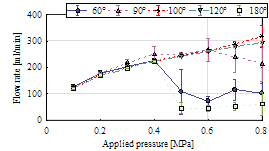
印加電圧75 V0-pにおける流量を最大流量とした結果を図7に示す.テーパ角が60°と180°の弁座の場合,印加圧力が0.4 MPaを越えると最大流量は低下する.これらは微粒子がオリフィスから十分遠ざからなかった結果である.このように極端なテーパ角では,一方の開口条件で有利となっても,もう一方の開口条件では不利となる.
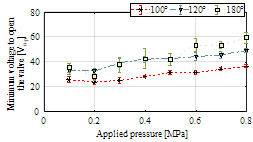
つぎに,印可圧力と開口に必要な最低動作電圧の関係を図8に示す.図8に示した3種の弁座では,微粒子は弁座の下端で接触するため,閉口時の受圧面積と接触角度は等しい.そのため,式(1)から得られる開口条件は同じであるが,弁座を移動中の微粒子と弁座の接触角度はテーパ角により異なる.それぞれの最低動作電圧は接触角度による力積の影響を考慮した結果と同じ傾向を示すことがわかった.
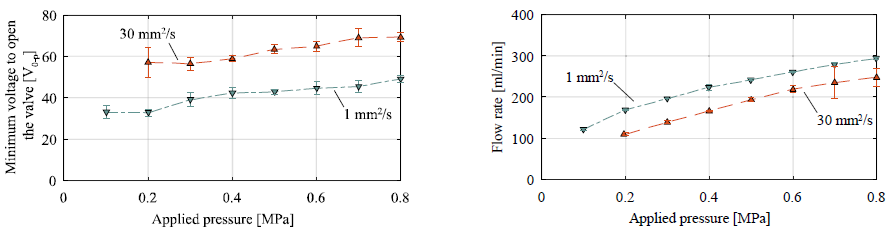
最後に,作動流体として一般的な作動油(ISO VG32)と同等の動粘度である30 mm2/sのシリコーンオイルを用いて,最低動作電圧および最大流量を測定した結果を図9に示す.実験には最も安定に動作したテーパ角120°の弁座を用いた.このように,従来の構造では動作しなかった粘度の流体でも動作可能であることが示された.
6.おわりに
本稿では,微粒子励振型流量制御弁について紹介し,受賞論文の概要を述べた.受賞論文では,振動モードを変更することで従来の振動モードでは不可能だった高い粘度の作動流体においても微粒子励振型流量制御弁が動作可能であることが示された.1章で述べたように微粒子励振型流量制御弁の油圧化には,粘度の上昇以外にも作動流体の密度の増加や動作圧力の上昇といった課題がある.今後はこれらの課題を解決する設計指針を確立していきたい.
参考文献
1) Raibert, M, et al.: Bigdog, the Rough-Terrain Quadruped Robot, Proceedings of the 17th World Congress. Vol. 17, No. 1, (2008)
2) Semini, C, et al.: Design of HyQ - a Hydraulically and Electrically Actuated Quadruped Robot, Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, Vol. 225, No. 6, p. 831–849 (2011)
4) 浮田貴宏,鈴森康一,難波江裕之他:微粒子励振型流量制御弁による油圧制御,日本フルードパワーシステム学会論文集,Vol. 47,No. 6,p. 1–8 (2016)
5) Hirooka, D, et al.: Flow control valve for pneumatic actuators using particle excitation by PZT vibrator, Sensors and Actuators A: Physical, vol. 155, No. 2, p. 285–289 (2009)
 著者紹介
著者紹介
うきだたかひろ
浮田貴宏 君
2018年東京工業大学大学院理工学研究科博士後期課程修了.油圧制御弁の研究に従事.日本フルードパワーシステム学会の会員.博士(工学).
E-mail: TakahiroUkida.rs(at)gmail.com
![]()
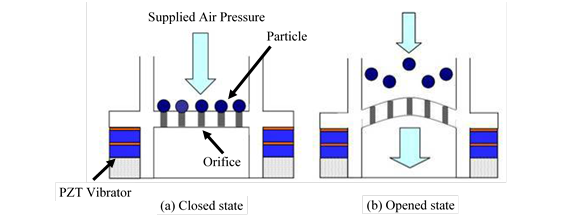
図1 微粒子励振型流量制御弁の動作原理
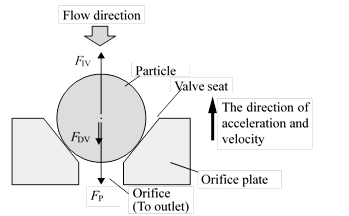
図2 従来の振動モードにおけるオリフィス上の微粒子に作用する力
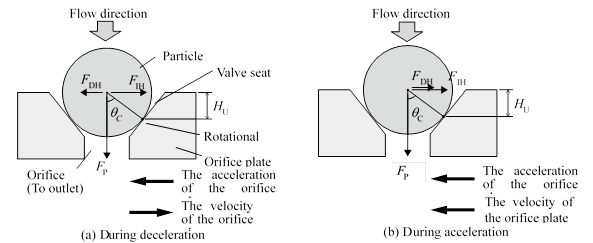
図3 流路に対して直交方向に振動するオリフィス上の微粒子に作用する力
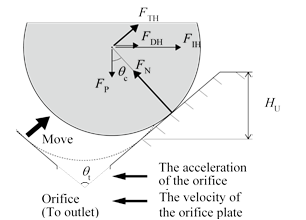
図4 弁座に沿って移動する微粒子に作用する力
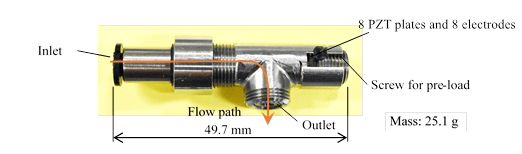
図5 試作した制御弁の外観
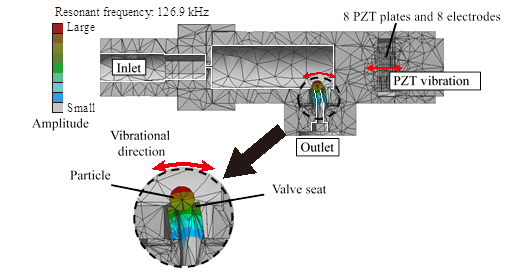
図6 有限要素法によるモーダル解析の結果