�P�D�͂��߂�
���̂��сC���{�t���[�h�p���[�V�X�e���w���̑I�l�Ŗ��@��Z�p�U�����c��������܂����Ă��������C��ό��h�Ɏv���D���̏�����肵�ĊW�Ҋe�ʂɐS��肨��\���グ��DE-FRIT���n�߂����������́C�G���u�v���Ɛ���v2013�N10�����̓��W�L���u�f�[�^�쓮����v�ŁC�����C���f���x�[�X�J���Ɏ��g�݁C�u�V�X�e������Ȃ��Ő���n�v�͂ł��Ȃ��v�ƍl���Ă����M�҂͑傫�Ȋ����������Ƃ����ł��o���Ă���D�{�e�ł́C��܂����uE-FRIT��p������C���T�[�{�n�̗͐���PID�R���g���[���v�v1) �̊T�v���Љ��D�{�_���͍��V�a�����i���C���{�c�Z�p�������j���݊w���ɍs�����������ʂ�_���ɂ܂Ƃ߂����̂ł���D
�Q�D�����T�v
�@�����E�ɑ�\�����t���[�h�p���[�쓮�V�X�e���ɂ́C�t�B�[�h�o�b�N�����Ƃ��ăV���v���������̂��₷������PID�����������p�����Ă���D�������C���̐����̂�����3�̃p�����[�^�iKp, Ti, Td�j�𗝑z�I�ɒ������邱�Ƃ͓���C���p�I�Ȓ�����@�̊J���͉i���̃e�[�}�ł���C�Â������X�̃A�v���[�`����������Ă����D
���Ƃ��C�ߔN�C�����ԋƊE�Ő���ɓ�������Ă��郂�f���x�[�X�J��(MBD�FModel Based Development)�ł́C�u�v�i���̌���v�C�u�J���R�X�g�̍팸�v�C�u�J�����Ԃ̒Z�k�v�Ȃǂ̉ۑ���������邽�߁C����n�v�v���Z�X�̏����i�K�ŐϋɓI�ɃV�~�����[�V�����ɂ�錟�E�]����������C�s��̑��������Ɛv�v���Z�X�̎�߂��h���ł���D���̂��߁C���̃��f���x�[�X�J���ł́C�V�~�����[�V�����̃x�[�X�ƂȂ鐔�����f���̓��肪�L�[�|�C���g�ƂȂ邪�C�t���[�h�p���[�V�X�e���ɓK�p�����ꍇ�C�T�[�{�o���u�Ɋ܂܂��s���ѓ����C�V�����_�Ɋ܂܂�門�C�����Ȃǂ̔���`�������܂ރ��f���̓���ɂ��Ȃ�̍H�����������Ă��܂��C���@�̓��o�̓f�[�^��蓯�肵�����f����p����PID�����̒����������Ȃ��ꍇ�ɂ́C����Ɏ��Ԃ�K�v�Ƃ��Ă��܂��D���̂��߁C���ۂ̌���Őv�҂��ȒP�ɉ^�p���邱�Ƃ͓���D
����C���f�����g�p���Ȃ����@�Ƃ��ẮCVRFT(Virtual Reference Feedback Tuning)�@�CFRIT(Fictitious Reference Iterative Tuning)�@�Ȃǂ���Ă���Ă���D�����̕��@�́C�O�q�̂悤�ɁC���w���f���̓���Ɛ���n�v�̓�i�K�̎菇�ނ��ƂȂ��C���@�̓��o�̓f�[�^���璼�ړI�������I��PID�����̒����������Ȃ��邽�߁C����n�v�ɂ����镉�S���y�����邱�Ƃ��\�ƂȂ�i�}1�j�D �܂��C�����͐���Ώۂ̎��萔�̒������w�v�����g�Ȃǃv���Z�X����n�ɗp�����邱�Ƃ������������C�ߔN�ł͗l�X�ȕ���œK�p���Ⴊ��Ă��ꉞ�p�͈͂��L���D
�����ʼn�X�́C���[�炪��Ă���FRIT�̊g���n�ł���E-FRIT(Extended Fictitious Reference Iterative Tuning)�@�ɒ��ڂ��C��C���T�[�{�n�̗͐���Ɏg�p����PID�����̃Q�C�������ɓK�p���C���̗L�����������ɂ�薾�炩�ɂ����DE-FRIT�@�́C����ȕ��[�v�n�Ŏ����������̌v���f�[�^�ɂ��C�I�[�o�[�V���[�g�Ȃ����[�U���w�肵�����莞�ԂŖڕW�l�ɓ��B����PID�����̃p�����[�^��Z���ԂŒ������邱�Ƃ��ł��C���ۂ̌���ł��v�҂��^�p�ł�����Ɏ��p�I�Ȓ������@�Ƃ��Ē��ڂ���Ă���i�}2�j�D�܂��CE-FRIT�@�ł́C�Q�C�������̍ۂɍœK�����A�����邽�߁C���炩�̍œK���A���S���Y������������K�v������C�œK����T������ۂ̐v�ϐ��̏㉺���l�̐ݒ肪���ƂȂ�D�T���͈͂��L������ƒ����ɑ����̎��Ԃ��K�v�ƂȂ�C��������Ƒ��I�œK����������Ȃ��ꍇ�����邪�CFRIT�@��E-FRIT�@��p����PID�Q�C�������Ă��鑽���̎���̒��ŁC���̓_�ɂ��ĐG����Ă�����̂͂قƂ�ǂȂ��D�����ʼn�X�́C�œK���A���S���Y���ɗ��q�Q�œK��PSO(Particle Swarm Optimization)���̗p���C�v�ϐ��̏���l�ݒ����[�v�V�X�e���̌v���f�[�^�����g����͂��邱�ƂŌ��ς�����@���Ă����D
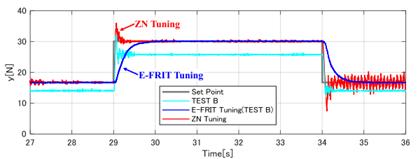
�}3��PID�Q�C���̒����̂��߂ɕ��[�v�n�Ōv���������o�̓f�[�^�������D���̃O���t�������ɓ��삵�Ă��邪�C������I�[�o�[�V���[�g���������Ă��邱�Ƃ��킩��D�����̌v���f�[�^��p���C�ڕW�l�܂ł̓��B���Ԃ�0.95s�Ɛݒ肵�CE-FRIT�@�ɂ��PID�Q�C�������Ď������s�������ʂ�}4�Ɏ����D�I�[�o�[�V���[�g�Ȃ��ݒ肵�����B���Ԃʼn������邱�Ƃ��m�F�ł����D
�R�D������
��ܘ_���̊T�v���Љ���D�{������i�߂�ɂ�����CE-FRIT��œK���Ɋւ��ď����������������R�Y�a�����ɐS��芴�ӂ̈ӂ�\���D
�Q�l����
1) ���R�h���C���V�a���C���K�j�FE-FRIT��p������C���T�[�{�n�̗͐���PID�R���g���[���v�C���{�t���[�h�p���[�V�X�e���w��_���W�CVol.49�CNo.2�Cp.42-48 (2018)
���ҏЉ�
 �ނ��܂�����
�ނ��܂�����
���R �h�� �N
2003�N�ʼnY�H�Ƒ�w��w�@�C�m�ے��C���D���N�i���j�E�F�[�u�t�����g���ЁC2005�N�l�I���E���E�e�N�m���W�[�i���j�C2015�N�ʼnY�H�Ƒ�w��w�@���H�w�����Ȕ��m�ے������ފw�C���N���ʼnY�H�ƃV�X�e�����H�w���@�B����V�X�e���w�Ȕ��u�t�C2017�N���m�i�H�w�j�ʼnY�H�Ƒ�w��w�i�_�����m�j�C���݂Ɏ���D��C���쓮�V�X�e���C���o�X�g����C���f�����O�C�V�X�e������C���{�e�B�N�X�Ȃǂ̌����J���ɏ]���D�v����������w��C���{�t���[�h�p���[�V�X�e���w��C���{�@�B�w��Ȃǂ̉���D���m�i�H�w�j
E-mail: nb12107(at)shibaura-it.ac.jp
![]()
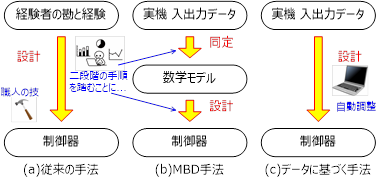
�}1�@����n�v�菇�ɂ���
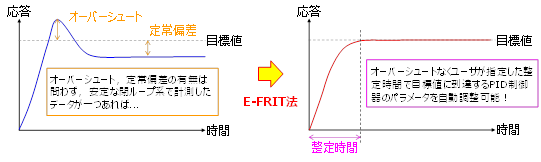
�}2�@E-FRIT�@�ɂ��PID����풲���̃C���[�W

�}3�@���o�́i���[�v�쓮�j�f�[�^
�}4�@��������