1.はじめに
この度は名誉あるSMC高田賞を賜り,誠に光栄である.受賞論文は「ポンプ供給圧低減による水圧モータシステムの高効率化」であり,本論文の共著者である芝浦工業大学教授の伊藤和寿先生をはじめ,本研究にご協力いただいた関係者の皆様に心より感謝申し上げる.本稿では受賞論文の研究について,その背景や概要を紹介させていただく.
2.研究背景
水圧システムは作動流体として清水を用いるため,機器の潤滑や耐食性の問題が生じるものの,高い清浄度と低い環境負荷を特長とし,食品加工,医療,医薬,遊戯施設,半導体製造等,さまざまな分野への適用が期待されている1).しかし,水圧システムは油圧システムと同様に,制御弁において絞り損失が発生するため,ポンプの供給圧をこの分高く取らざるを得ず,結果的にエネルギー効率の低下につながっている.水圧システムに限らず,システムの省エネルギー化の方法としては,要素機器単体の効率改善を除くと,システム内の圧力損失を低減化する方法と,エネルギー回生を行う方法とにわけられる.
前者に関しては,ロードセンシングシステムやIndependent metering システム2)が提案されている.これらは,ポンプ押しのけ容積を制御することにより,余分なポンプ供給流量の発生を防ぎ,システム内の圧力損失を低減することで結果的にポンプ供給圧を低減させている.これらのシステムは,油圧システムに対しては効果が確認されている.一方,水圧システムにおいては,内部漏れや材料選定の難しさから,可変容量ポンプがほとんど市場に出回っておらず,これらのシステムを広い分野に適用することが難しい3).ポンプ供給流量を制御するために原動機の回転数を制御することも可能であるが4)-6),一つの原動機が複数のポンプを駆動する場合を考えると,これは得策ではない.水圧システムに適した圧力損失低減手法が求められる.
一方,エネルギー回生を行う方法は,従来は捨てられていたエネルギーを回収機構を用いて回収し,それをつぎの運転サイクルで活用するものであるが,特にアキュムレータを用いたエネルギー回収機構は,エネルギー変換ロスが削減できるため,油圧システムだけでなく,水圧システムに対しても有効な手法である7)-8).
そこで受賞論文では,供給源からの供給流量が一定である水圧モータ回転速度制御系に対し,ポンプの供給圧を低減させるための回路を提案した.具体的には,制御弁における絞り損失を低減させる回路と,アキュムレータを用いたエネルギー回収回路の二つを提案した.これらのシステムと,従来の水圧モータ駆動回路の制御性能およびポンプの供給エネルギーを実験により比較し,水圧システムにとってどちらの省エネルギー化手法がより有効か検証した.
3.従来回路と提案回路
省エネルギー化を行わない従来回路(Conv.)を図1に示す.サーボ弁(SV)により,水圧モータ(WHM)の同軸上に設置されたフライホイール(FW)の回転速度ωFWが目標回転速度ωref.に追従するように制御する.つまり,水圧モータは常にメータイン制御およびメータアウト制御で駆動される.よって,ポンプ供給圧psの定常値は式(1)によって計算される.
![]() (1)
(1)
ただし,pL( = p2−p1 )は水圧モータ負荷圧力であり,これは水圧モータを駆動するために必要な圧力である.Δpin,ΔpoutはそれぞれSVにおけるメータインおよびメータアウトでの絞り損失,plossは配管内での圧力損失,pTはタンク圧である.pLは水圧モータが負荷を駆動する動作の要求仕様によって決定される値であるため,低減は難しい.また,plossおよびpTはハードウェアの改善によって低減可能であるが,式(1)右辺において支配的ではない.一方,ΔpinおよびΔpoutは回路によっては大幅な低減が可能である上,これらの支配度は大きい.よって,これらが低減されればpsは結果的に低下し,システムは省エネルギー化される.
制御弁における絞り損失を低減させる提案回路1(Prop.1)を図2に示す.また,水圧モータの各行程における弁の動作を表1にまとめる.この回路は,二つのサーボ弁(SV1,SV2)をそれぞれ独立して駆動することによって,回路全体の絞り損失を低減させる回路となっている.水圧モータ減速時には,SV1がメータアウトでωFWを制御する.その間,水圧モータは慣性で回転するため,ポンプからエネルギーを供給する必要はなく,電磁弁(On/Off1)を開口させることによってポンプをアンロードさせる.一方,水圧モータ等速運転および加速時には,On/Off1を閉じ,On/Off2を開口することによってポンプ供給エネルギーを水圧モータp2側に導く.ここで,SV2がブリードオフでωFWを制御することにより,余分なポンプ供給流量はタンクへ戻される.つまり,ポンプから水圧モータへの供給流量はSV2によって間接的に制御される.この時,SV1は戻りの経路における絞り損失を低減させるため,全開口とする.よって,この回路は式(1)におけるΔpinとΔpoutが低減され,理論的には必要最低限のポンプ供給圧力で駆動可能である.
次に,アキュムレータ(ACC)を用いてエネルギーを回生する提案回路2(Prop.2)を図3に示す.また,水圧モータの各行程における弁の動作を表2にまとめる.この回路は,水圧モータ減速時に発生する回収可能エネルギーをACCで回収し,つぎのサイクルでこれを水圧モータに供給する回路である.水圧モータ減速時には,On/Off2を開口することによって回収可能エネルギーをACC内に蓄える.この間,On/Off1の開口によってポンプはアンロードされる.ACCが回収したエネルギーを水圧モータに供給する際は,On/Off3を開口する.この間もポンプはアンロードされる.ACCがエネルギーを保持していない時の水圧モータ等速および加速時には,従来回路と同様にSV2がメータインおよびメータアウトでωFWを制御する.
4.実験による制御性能とエネルギー性能の評価
従来回路(Conv.)と,提案回路1(Prop.1)と,提案回路2(Prop.2)の水圧モータ回転速度ωFWを図4に示す.尚,パウダーブレーキ(PB)を用いて4N・mの負荷トルクTLを水圧モータへ与えている.また,このときのポンプ供給圧力psを図5に示す.これらの図より,Conv.はリリーフ弁のオーバーライド特性に依存してつねに高い圧力を供給していることがわかる.一方,Prop.1は12〜15sでブリードオフ制御に起因するオーバーシュートが発生しているものの,減速行程時はポンプは無負荷で駆動され,等速および加速行程時も pLに依存してpsが変化するため,Conv.に比べpsが大幅に低減されている.同様に,Prop.2も減速行程時はポンプは無負荷で駆動され,その上,15.00〜15.45sは減速工程時にACCが回収したエネルギーによって水圧モータを駆動しているため,その間もポンプは無負荷で駆動されている.しかし,水の漏れやすさと,水圧サーボ弁独特の構造から,ACCは理想的なエネルギー回収ができず,結果的にアシスト時間が短くなっている.
図6にωref.に対する回転速度誤差の二乗和の計算結果をまとめる.なお,図の横軸はPBにより与えた負荷トルクTLの大きさであり,それぞれの条件に対して5回ずつ実験を行った結果の平均値を示している.また,図7にConv.のポンプ供給エネルギーに対するProp.1およびProp.2のポンプ供給エネルギーの比を示す.これらの図より,Conv.に対してProp.1は5%程度,Prop.2は10%程度回転速度誤差の二乗和の値が増加していることがわかる.一方,Conv.に対してProp.1の場合は40%程度, Prop.2の場合は10%程度ポンプ供給エネルギーが低減されている.また,Prop.1はTLが大きくなるほどポンプ供給エネルギーが増加している.これは, TLが大きくなると式(1)における水圧モータ負荷圧力pLが増加し,それに応じてポンプ供給圧psが増加するからである.
5.おわりに
本稿では,供給源からの供給流量が一定である水圧モータ回転速度制御系に対し,省エネルギー化を達成するために,制御弁における絞り損失を低減させる回路(Prop.1)と,アキュムレータを用いたエネルギー回収回路(Prop.2)の二つの提案回路について紹介し,受賞論文の概要を述べた.水は作動油に比べ粘度が小さく,配管における圧力損失が小さいため,受賞論文では,その水の特性を生かしたProp.1の有用性が示された.しかし,Prop.1はブリードオフ制御で水圧モータを駆動するため,オーバーシュートに対して直接的に有効な抑制手段が少ない.今後は,Prop.1に有限時間内の状態を予測し,制約条件を考慮した最適制御入力を算出する制御手法などを適用することで,制御性能が改善されればよいと考えている.
参考文献
1) 宮川新平,望月宣宏,山科智四郎:水圧サーボシステムの応用,計測と制御,Vol.35,No.2,p.120-124 (1996)
2) Bing X., Ruqi D., Junhui Z., Min C., Tong S. : Pump/valves coordinate control of the independent metering system for mobile machinery, Automation in Construction, Vol.57, p.98-111(2015)
3) Rokala, M. : Analysis of Slipper Structures in Water Hydraulic Axial Piston Pumps, PhD Dissertation, Tampere University of Technology, p.16-17(2012)
4) 中野和夫,田中豊,戸田宜彦:省エネルギー形電気・油圧サーボ系(定容量形油圧ポンプの回転速度制御),油圧と空気圧,Vol.18,No.2,p.72-79(1986)
5) 田中豊,中野和夫:インバータ運転を用いた省エネルギー形定圧油圧源(油圧源電動機の状態量からの圧力の算定),油圧と空気圧,Vol.20,No.3,p.73-78(1989)
6) 田中豊,中野和夫,山本直行:インバータ運転を用いた省エネルギー形定圧油圧源(第二報 二圧制御システムの実現),油圧と空気圧,Vol.21,No.4,p.78-86(1990)
7) 八木澤遼,伊藤和寿,Pha N. Pham:サクションブースト式エネルギー回生による油圧ショベルの高効率化,p.74-76,春季フルードパワーシステム講演会講演論文集(2016)
8) Lianpeng X., Long Q., Bin Z., Chengbin W., Wenjing S. : RESEARCH ON HYDRAULIC - GAS COMBINED DRIVING SYSTEM FOR HYDRAULIC EXCAVATOR BOOM, 10th JFPS International Symposium on Fluid Power(2017)
著者紹介

八木澤遼 君
2016年芝浦工業大学大学システム理工学部卒業,2018年同大学大学院理工学研究科博士前期課程修了.同年日立建機株式会社入社,現在に至る.日本フルードパワーシステム学会の会員.
E-mail: md16092(at)shibaura-it.ac.jp
![]()
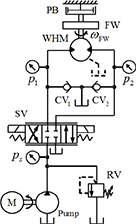
図1 従来回路(Conv.)
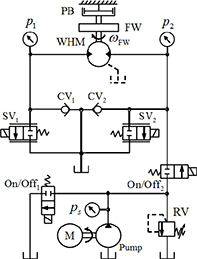
図2 提案回路1(Prop.1)
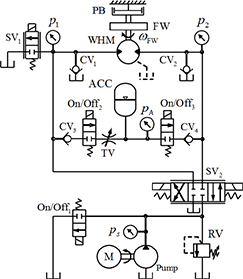
図3 提案回路2(Prop.2)
| 表1 提案回路1の各弁の動作 | ||
|
Phase Valve |
Deceleration |
Constant velocity and acceleration |
|
On/Off1 |
open |
close |
|
On/Off2 |
close |
open |
|
SV1 |
control |
full open |
|
SV2 |
close |
control |
| 表2 提案回路2の各弁の動作 | |||
|
Phase Valve |
Deceleration |
Assist |
Constant velocity and acceleration |
|
On/Off1 |
open |
close |
|
|
On/Off2 |
open |
close |
|
|
On/Off3 |
close |
open |
close |
|
SV1 |
close |
full open |
close |
|
SV2 |
close |
control |
|
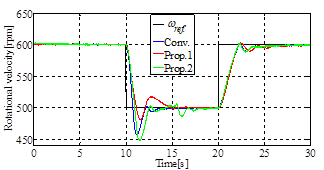
図4 水圧モータ回転速度ωFW
(負荷4N・m)
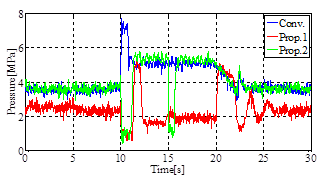
図5 ポンプ供給圧力ps
(負荷4N・m)
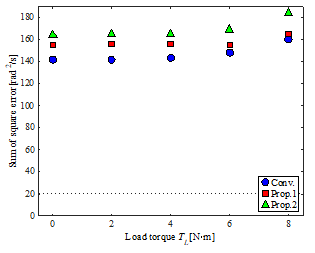
図6 回転速度誤差の二乗和
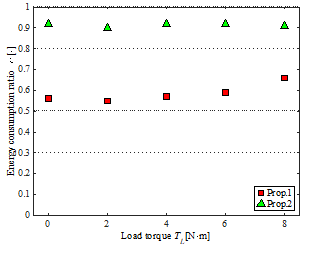
図7 従来回路のポンプ供給エネルギーに
対する提案回路1および提案回路2の
ポンプ供給エネルギーの比