�P�D�͂��߂�
���̂��сC���{�t���[�h�p���[�V�X�e���w���̑I�l�Ŗ��@��Z�p�U�����c��������܂����Ă��������C��ό��h�Ɏv���D��݂ƂȂ�܂����������C���c�̕��X���͂��ߊW�e�ʂɌ�������\���グ��D�{�e�ł́C��܂����u��C���F�쓮�@�\��p�����l�H�w�ɂ��ގ��F���V�X�e���Ɋւ��錤���v1) �̊T�v���Љ��D�{�_���͔�����q���A�剺���S���i���C���x�m�[���b�N�X�j���݊w���ɍs�����������ʂ�_���ɂ܂Ƃ߂����̂ł���D
�Q�D�w�i�ƖړI
�@�q�g�����ɐG�ꂽ�Ƃ��Ɋ���������̂悤�ȗ₽���G����؍ޓ��L�̉�����C�Ȃ̂ӂ�ӂ킵�����G�Ƃ������G�o���犴����鎿���͔]�̏����ɂ���ė^������D�q�g�����ɐG�ꂽ�Ƃ��ɔ]���Ŋ����鎿���͌̍������邽�߂ɁC�����̗v�f���犴�o�Ă��邩�𖾂��邱�Ƃ͍���ł���D�������C�����w�I�Ɍ����G�o��e��̎�ނ���l���āC��ʂ��āu���́v�u�U���v�u���x�v��3�v�f���畡���I�ɔ��f���Ă���ƌ�����D3���q�ōގ��F���̃V�X�e�����\�z���邱�Ƃɐ������Ă���D�{�����ł͎����̗v�f���������q�ƌĂсC���ꂼ��u�d�����q�v�u�\�ʏ�Ԉ��q�v�u���x���q�v�ƌď̂��Ă���D
�{�����ł́C�c�Q�[�W�ƔM�d��p���āC�\�ʏ�ԁC�d���C���x�����o����߂����l�H�w�삵�C��C���A�N�`���G�[�^��p���Ĕ\���I�ȐG�m�o��������邱�Ƃɂ��q�g�ɋ߂��G�o�����@�\������C�����l�H�w���J�������i�}1�j�D�܂��C�����ɂ���Ď������q���q�g���瓾����]���Ɠ����ɂ��邽�߁C�q�g�̔]���ɂ�����_�o�זE�̌����\����͋[�����j���[�����l�b�g���[�N�̍œK�����s���q�g�Ɠ����̍ގ��̔��ʂ��s����ގ��F���V�X�e�����\�z������̂ł���D
�R�D�����T�v
�q�g�̂悤�ȐG�o���������F���V�X�e�����\�z����ɂ́C�q�g�̔]���ŋN���銴�����ʓI�Ȓl�Œ��o���āC��̃j���[�����l�b�g���[�N�ł̋��t�f�[�^�Ƃ��ė��p����K�v������D�܂��C�\���I�ȐG�m�o�����l�H�w�֓������邽�߂ɂ��q�g�̐G�o�����f�[�^�͕K�v�ł���D�q�g�̊������𒊏o���邽�߂̐S���]��@�́C��������Ă���Ă��邪�C����}�O�j�`���[�h����@���x�[�X�ɗp�����D��g�p����20��ނ̎����̂Ȃ��Ŏ������߂������̂Ǝv���鎎����1��ɕ��ނ����D��̓I�ɂ́u���C�A���~�j�E���v�C�u�A�N�����C�A�N�����i���j�v�C�u���C�w�C�I�C�����U�[�v�u�S���C�d���S���v�u���A�X�`���[���C�i�{�[���C�O���[�u�v�v�ł���C�{�����ōs���ގ��F���̐��x������13��ނʂł��邱�Ƃ�ڕW�Ƃ���D�d�����q�ƕ\�ʏ�Ԉ��q�̎U�z�}�ŕ\�������̂�}2�ɂ��߂��D
�{�����ł͊߂̋Ȃ��𗘗p�����\���I�ȐG�m�o������Ă����D��̓I�ɂ́C�����������쎞�ɓ���ꂽ�d���C���x���q�𗘗p���āC�Ȃ��蓮�쎞�̎����ɑ��Ẳ��������͂߂���Ƃ������̂ł���D�܂��C���̂Ƃ��̉��������͂̌���ɂ́C�j���[�����l�b�g���[�N�������D
�{�����Œ�Ă��������20��ނ̎����ɑ��Ă��ꂼ��3��s�����D�e�������q�̑��茋�ʂ��q�g�̐G�o�����f�[�^�ƎI�ȐG�m�o����ɂ��e�������q����ׂĐ}3�C4�C5�ɂ��߂��D�}���C���ɎI�ȐG�m�o����̍ۂɖ��ł������\�ʏ�Ԉ��q�f�[�^�����P����Ă��邱�Ƃ��킩��C������\���I�ȐG�m�o����̐l�H�w�ւ̓������ގ��F���V�X�e���ɂƂ��ėL�v�ł��邱�Ƃ��킩��D
�S�D������
�@�\���I�ȐG�m�o����́C�q�g�̊��o���C�^���w�߂�p���čs���Ă���ߒ���͋[���ē���̍\�z�����D����ɂ���āC�I�ȐG�m�o����ł͉����ł��Ȃ��q�g�̎������q�Ƃ̈Ⴂ���������Ă��܂������������邱�Ƃ��ł����D�܂����A���^�C���ȔF���V�X�e�����\�z�����D�{�V�X�e����FPGA��}�C�R�����ɈڐA���邱�ƂœƗ������ގ��F���V�X�e�����\�z���邱�Ƃ��\�ł���C�����d�ʕϊ��C�j���[�����l�b�g���[�N��Ɨ������`�b�v�ɏW�ē��������邱�Ƃŏ������Ԃ�Z�k���邱�Ƃ��\�ƍl����D��L�̉ۑ�����Ɍ����Ă���Ɍ�����i�߂����D
�Q�l����
1) �g���r��C�剺���S�C������q�C���R �I�@��C���F�쓮�@�\��p�����l�H�w�ɂ��ގ��F���V�X�e���Ɋւ��錤���C���{�t���[�h�p���[�V�X�e���w��_���W�CVol.49�CNo.3�Cp.80-88 (2018)
���ҏЉ�

�g���r���@�N
2000�N������w��w�@���m����ے��C��
���N�_�ސ�H�ȑ�w�H�w������.���݂͏y�����D��C������V�X�e���̌����ɏ]���C���{�t���[�h�p���[�V�X�e���w��C���{�@�B�w��C�v����������w��Ȃǂ̉���D���m(�H�w)�D
E-mail: yosimitu(at)rm.kanagawa-it.ac.jp
![]()
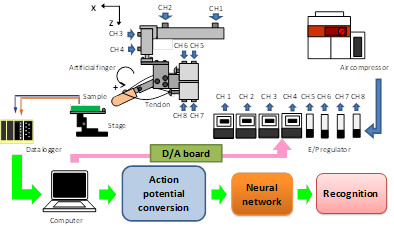
�}1 Outline of recognition system
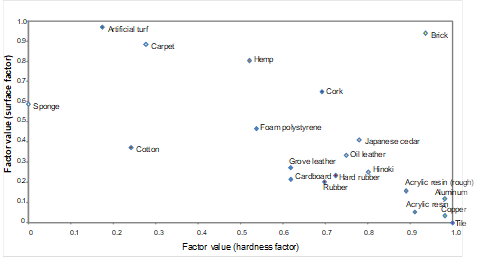
�}2 Scatter diagram for hardness factor and surface factor
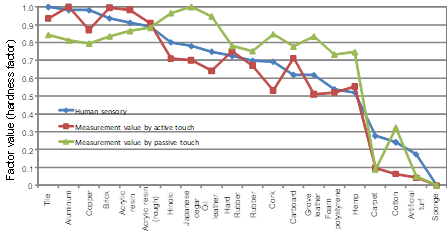
�}3 Performance evaluation of the hardness factor
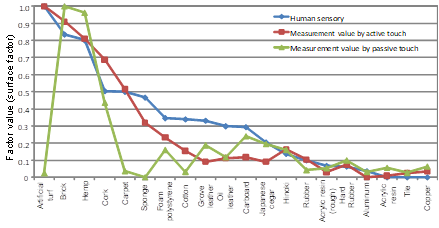
�}4 Performance evaluation of the surface factor
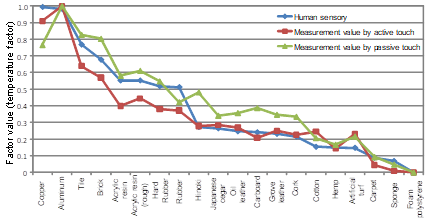
�}5 Performance evaluation of the temperature factor