1.はじめに
この度は,JFPS名誉員に推挙いただき大変光栄なことと感謝しています.また,このような執筆の機会をいただきありがとうございます.
本学会の細則によると,「正会員のうち,学会の地位を学術的,社会的に高めた者で,原則として満 65 歳以上の者を名誉員とする.」とある.年齢だけはこの要件に適っている.本学会とのお付き合いは40年を超え,年の功をお認めいただいたのであろう.この間,本学会誌にいくつかの学術論文や解説記事を掲載していただくとともに,本学会主催の講習会の講師やいくつかの委員会を担当させていただいた.いろいろなことが記憶にあるが,委員長を務めさせていただいた編集委員会は懐かしい思い出である.隔月に機械振興会館に集まり委員の皆様と学会誌の内容を企画した.何号か先までの学会誌の内容を自由に議論できる楽しい委員会であった.毎回の楽しさは場所を変えて(第2)編集委員会まで続いた.岡山へ帰る新幹線に遅れないよう,何度か浜松町駅まで走ったことを覚えている.岡山への帰宅は,いつも24時前になったが,疲れはさほど感じなかった.つい先日のように思い出すが,かなり以前のことである.
さて,2018年5月に学術貢献賞をいただき,同年の本誌緑陰特集号に「学術貢献賞を受賞して(空気圧とともに)」と題して寄稿させていただいた1).また,本誌2020年1月号で「空気圧のイノベーションに向けて」と題して研究活動の概要と今後の展望について記させていただいた 2).これら2件の記事においてこれまで40年間の研究活動を紹介する機会をいただいたので,本稿では,空気圧技術が将来貢献できそうな分野のひとつとして,空気圧ゴム人工筋の福祉介護分野への応用について述べる.
2.空気圧ゴム人工筋
2.1 基本的なゴム人工筋
図1は代表的なマッキベン型ゴム人工筋である.ゴムチューブを所定の角度で編んだ繊維スリーブで繊維強化したものであり,ゴムチューブの加圧により軸方向の収縮動作が得られる.繊維の編み角度により動作が異なり,軸方向に対する編み角度が大きくなると収縮動作から伸長動作へ変化する.図2は編み角度が90°の場合に相当する伸長型ゴム人工筋であり,ゴムチューブを加圧すると軸方向に伸長する.図はこの人工筋の下側の伸びを繊維テープで拘束したものである.ゴムチューブを加圧すると人工筋の上側だけが伸びるため,図のような湾曲動作が得られる.加圧力により湾曲角度を調整できる.筆者らは,これを湾曲型ゴム人工筋と呼んでいる.
2.2 平面状ゴム人工筋
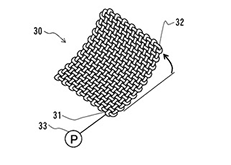
図3は細くて長い1本のマッキベン型ゴム人工筋をネットに編み込んで構成した平面状ゴム人工筋である.ネットへの編み込みを工夫することにより種々の使い方が期待される.
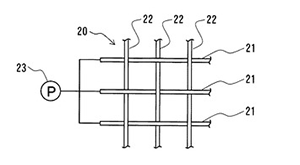
図4は長尺のマッキベン型ゴム人工筋の一つの製造法である.筆者らは伝統的な製紐機を用いて安価に大量生産する方法を提案している3).図3ではゴムチューブ( 内径: 1.8[mm],外径: 3.2[mm])と強化繊維(ポリエステル)を用いて製紐機により製造したマッキベン型ゴム人工筋(筆者らはマッスルストリングと呼んだ)を用いている.打合せのため岡山県南の製紐メーカを訪問したとき,工場内で何台もの製紐機がつぎつぎと組紐を生産する様子を見て,同行した学生とともにゴム人工筋が大量に生産される状況を夢見たことを覚えている.
図5(a)は細型のマッキベン型ゴム人工筋を縦横に編んだものであり,縦と横の人工筋の役割を工夫することにより,種々の機能を持つネット状ゴム人工筋が構成できる.図5(b)はネット状に編んだものである.編み方によって部分的な伸縮度合いや発生力を変えることができる.これらは現在,特許登録の段階3)であるが,今後の新たな応用が期待される.
3.パワーアシストウェア
空気圧ゴム人工筋の第1の特徴は軽量で柔軟なことである.人間を対象とする福祉介護分野では,これらの特徴を活かした応用が期待される.このような観点から筆者らは外骨格のない衣服状パワーアシスト装置(パワーアシストウェアと呼ぶ)の実現に向けて活動している.
たとえば,図2の湾曲型ゴム人工筋の開発と同時に,これを図6のような手袋型支援装置へ応用し,パワーアシストグローブと呼んだ4).手袋の指背の部分に湾曲型ゴム人工筋を取り付けることにより指の曲げや握力を支援できる.ある学会の福祉工学関連のセミナーで本グローブを紹介したとき,講演後,フロアーの女性から「私は指が不自由で苦労しています.そのグローブはどこで買えるのですか.」と尋ねられた.これに対して,「このグローブはまだ大学の研究室段階で商品はないのですよ.」と答えるしかなく,早く商品化して必要な人に届けたいと思ったことを覚えている.その後,幸いにパワーアシストグローブは岡山市内の企業により商品化され,必要な人は入手できる状況になっている 5).あの時お尋ねいただいた女性にも届いていれば嬉しいことである.
4.福祉介護分野への応用
少子高齢化により各分野で将来の人材不足が懸念されている.たとえば,戦後の出生数のピークは1949年の269万6638人(団塊の世代)である.これに対して2019年の出生数は過去最少の86万5234人に落ち込み,初めて90万人を下回った.一方,65歳以上の高齢者人口は2019年9月15日現在約3588万人で,総人口に占める割合は28.4%である.これらの高齢者を支える介護人材は2025年には約253万人必要になるが,このうち215万人しか確保できず38万人が不足するとされている.また,在宅介護や老老介護が増加するとされている.団塊世代が75歳以上になる2024年以降,介護の問題はより深刻化する.筆者も1949年生まれであり,考えれば恐ろしい状況である.
このような状況に対応するためには,介護現場の労働環境の整備や省人省力化,在宅における介護支援,被介護者の自立支援などが不可欠である.厚生労働省と経済産業省はロボット介護機器の重点項目(平成24年11月策定,平成26年2月改訂)を示している.図7はその一部であり,装着型の介助や移動支援のイメージである.重点項目に対応して,各メーカからすでに多くの介護機器が商品化されているが,介護現場への導入はあまり進んでいないようである.その理由として,重くて硬く装着すること自体が負担になる,サイズが大きく嵩張り狭い介護現場での利用に不向き,着脱などの取り扱いに時間を要する,価格が高く施設の介護職員全員への提供は容易でないなどの課題が介護施設へのアンケートなどから得られている.
空気圧技術はこのような課題解決のための一つのキーテクノロジーであると考え,上記のパワーアシストウェアの概念を提案している.空気圧ゴム人工筋は介護者の負担軽減や被介護者のQOL 向上などへの応用が期待され,軽くて柔らかく常時着用が可能な衣服状のパワーアシストウェアが実現できればきわめて有用である.図8は衣服状介護アシストウェアの概念を示す.これを実現するためには多くの課題があるが,たとえば,図5のネット状人工筋などの利用が期待される.
5.おわりに
空気圧技術は今後の介護問題へ対応するため有効な手段と考えられる.パワーアシストウェアはその一つの事例である.実用的な研究成果を生み出すためには,使い古された言葉であるが,ニーズとシーズが適切に融合した成果を仕上げていく必要がある.特に介護分野においては,開発する工学者とそれを利用する介護職には専門性に大きな開きがあるため両者の密接な連携が不可欠である.このような観点から,筆者が所属する美作大学地域生活科学研究所では,2019 年 1 月に「介護ロボット研究会」を設置している.本研究会は産学官および介護施設などの連携組織とし,介護ロボットや機器の開発者と利用者が情報交換や協議する場を設けることにより,現場のニーズを反映した介護ロボットや機器の形態や機能,これらを活用した効果的な介護方法などを議論し,具体的なロボットや機器の開発や製作,実用化を推進するものである.研究会では,介護ロボットや機器の現場への導入が進まない理由として,高価格,有用性に疑問,操作が煩雑,着脱の手間,利用者の意識不足などの課題が指摘されている.これらの課題を念頭において,上記の衣服状介護アシストウェアなどの実用化に向けた試みを続けたいと考えている.
名誉員拝命を区切りとし,筆者自身の今後へ向けた思いを述べさせていただいた.空気圧との付き合いはまだ続きそうである.本学会のますますのご発展をお祈りします.
参考文献
1) 則次俊郎:学術貢献賞を受賞して(空気圧とともに),フルードパワーシステム,Vol.49, No.E1(緑陰特集号),p.E31-E36 (2018)
2) 則次俊郎:空気圧のイノベーションにむけて,フルードパワーシステム,Vo.51, No.1,p.16-19 (2020)
3) 則次俊郎:特許第5017660号,立ち上がり動作支援装置(出願2006,登録2012)
4) 佐々木大輔,則次俊郎,山本裕司,高岩昌弘:空気圧ゴム人工筋を用いたパワーアシストグローブの開 発,日本ロボット学会誌,Vol.24, No.5, p.640-646 (2006)
5) 則次俊郎,佐々木大輔,小川和徳,池田智浩:特許第5957786号,手袋型パワーアシスト装置(出願2012,登録2016)
著者紹介

則次俊郎 君
1974年岡山大学大学院工学研究科修士課程修了.同年津山工業高等専門学校助手,講師,助教授を経て,1986年岡山大学工学部助教授,1991年同教授,2005年同大学大学院自然科学研究科教授,2013年同大学名誉教授,同年津山工業高等専門学校長,2018年津山工業高等専門学校名誉教授,同年美作大学/美作大学短期大学部特任教授,現在に至る.ロボット工学および制御工学の研究に従事.日本機械学会,日本ロボット学会および計測自動制御学会のフェロー.日本フルードパワーシステム学会,バイオメカニズム学会などの会員.工学博士.
E-mail: toshiro(at)mimasaka.ac.jp
![]()
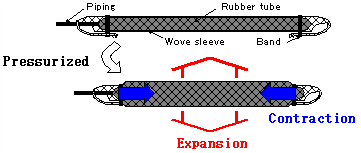
図1 マッキベン型ゴム人工筋
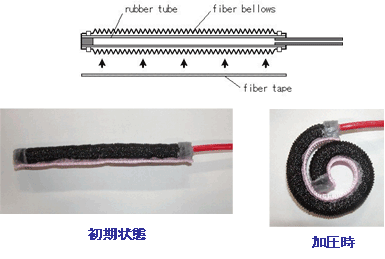
図2 湾曲型ゴム人工筋
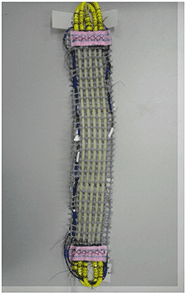
図3 平面状ゴム人工筋
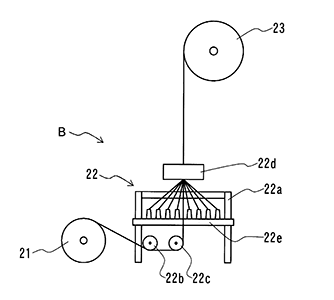
図4 製紐機の構造
(b) 織物構造
図5 ネット状ゴム人工筋


図6 パワーアシストグローブ[原型(左)と商品(右)]
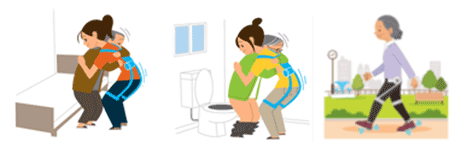
図7 ロボット介護機器の重点項目の例
(厚生労働省・経済産業省資料より引用
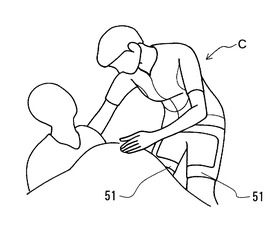
図8 衣服状介護アシストウェアの概念