1.はじめに
日本フルードパワーシステム学会学術論文賞という大変栄誉ある賞をいただき心より感謝申し上げる.受賞をいただいた論文は,本稿の著者と神田岳文教授(岡山大学 学術研究院 自然科学学域)の指導の下,受賞論文筆頭著者の小川草太氏(2020年3月,岡山大学 大学院 博士前期課程修了)が中心的な役割を果たしながら,同氏の先輩の大村健人氏(2019年3月,同博士前期課程修了),後輩の安藤克倫氏(2021年3月,同博士前期課程修了)とともに実施した研究をまとめたものである.本論文の研究成果は彼らの熱心な研究活動によるものが大きく論文共著者という立場ではあるが深く敬意を表する.
本稿では受賞論文となった「製紐機を用いたインダクタンス型スマート人工筋の製作手法の確立」1)について論文の概要を紹介させていただく.
2.論文「製紐機を用いたインダクタンス型スマート人工筋の製作手法の確立」の概要
2.1 背景と目的
流体駆動のソフトアクチュエータの一種であるMcKibben型人工筋は柔軟・軽量・高い形状適応性といった特徴を有している.人工筋の利便性の向上を目指し,人工筋に柔軟なセンサを搭載する研究が多数実施されているが,多くの場合ではアクチュエータとセンサをそれぞれ製作した後に統合している.これに対して,人工筋の構成要素であるスリーブの繊維をセンサとして利用する研究が行われている2) - 5).変位センサの付与に関する研究では,導電性繊維を用いたインダクタンス型のセンサ機能をもつ人工筋が報告されている5).このようなセンサ機能付きの人工筋が広く実用されるためには容易な製作プロセスを確立することが必要である.受賞論文では,スリーブの繊維の一部に導電性繊維であるエナメル線を使用したMcKibben型人工筋を紐の製造装置である製紐機(せいちゅうき)によって効率的に製作する手法を提案した.製紐機を用いることで,容易に収縮,伸長のそれぞれの動作が可能なセンサ機能付き人工筋(スマート人工筋)が製作可能であることを示した.加えて,収縮型のスマート人工筋では作動流体として磁性流体を用いることでセンサ出力を増幅する手法を提案した.
2.2 製作プロセス
McKibben型人工筋は図1に示す構造であり,ゴムチューブを編み込んだ繊維層のスリーブで覆っている.ゴムチューブに空気圧を印加すると繊維の編角が変化しながらアクチュエータとして動作する.図1では軸方向へ収縮するタイプのみを記載しているが伸長タイプを実現することも可能である.人工筋が収縮型になるのか,伸長型になるのかは人工筋製作時の繊維の初期編角によって決定される.具体的には,図1に示した初期編角q0が54.7°より小さければ収縮型に,大きければ伸長型となる.図2の上図は本研究で人工筋の製作に使用した製紐機である. A部でスリーブの材料となる繊維を巻いたボビンがキャリアに接続されている.キャリアは,円環状の溝に沿って半数が右回りに,半数が左回りに互いに交差しながら公転し,ボビンから引き出された繊維はメッシュ状に編み込まれる.これと同時にB部ではキャリアの公転中心軸上に配置したゴムチューブをローラによって引き上げる.これらの動作によりC部でMcKibben型人工筋が製作される6).キャリアの公転速度とゴムチューブの引き上げ速度の比はD部の歯車の組み合わせに依存する.この速度比によってスリーブの繊維の初期編角が決まるため,歯車の選定によって収縮型,伸長型の人工筋を任意に製作することができる.一部のボビンにエナメル線を搭載し,この製作プロセスを実施することで図2の下図に示すようにエナメル線を複合したスリーブを有する人工筋を容易に製作できる.エナメル線はコイル状であり,その形状は人工筋の変位に依存するため,エナメル線のインダクタンスを計測すれば収縮型,伸長型ともに,その変位を推定することが可能である.
2.3 実験結果
収縮型,伸長型のスマート人工筋へ空気圧を印加しながら,人工筋の変位率とエナメル線のインダクタンスの変化量を測定した結果を図3,図4に示す.それぞれの人工筋において収縮率,伸長率とインダクタンスの変化量に相関が確認でき,製紐機によってセンサ機能を有する収縮型,伸長型のスマート人工筋が実現できることが示された.
収縮型の人工筋は理論上,スリーブの繊維の編角が小さいほど収縮率が大きくなる.しかし,編角を小さく設計するとスマート人工筋の表面に形成されたコイルの巻数が減少し,センサ出力が小さくなり計測が難しくなる.また,人工筋の小型化によってもセンサ出力が低下する.人工筋の編角の変更や小型化を想定し,センサ出力を増加させる手法として磁性流体の利用を提案し基礎実験を実施した.本実験では,ポリビニルアルコールに鉄粉を混合した磁性流体を作動流体として使用した.図5に示すように作動流体を空気・磁性流体とした場合の人工筋の収縮率の差は1%程度である.一方で図6は収縮率に対するインダクタンスの変化量を示しており,空気と比較し磁性流体を用いた場合はインダクタンスの変化量が約3倍となった.これらの結果より,作動流体を磁性流体とした場合,収縮率の低下をほとんど生じさせることなくインダクタンスの変化量を増加させることが可能であることがわかる.
2.4 まとめ
変位が推定可能なスマート人工筋の製作手法を製紐機を用いて確立した.本製作手法では,製紐機のボビンにエナメル線をセットするのみでアクチュエータの構成要素である繊維がセンサとして利用可能となる.さらに,製紐機の歯車を変更するのみで,収縮型,伸長型の両タイプのスマート人工筋が容易に製作可能である.製作した両スマート人工筋で変位率とセンサ出力であるインダクタンスの変化量の相関が確認できた.また,収縮型スマート人工筋の小型化などによって生じることが予想されるセンサ出力の低下を抑える試みとして作動流体を磁性流体とする駆動方法を提案した.磁性流体を用いることでインダクタンスの変化量が増大することを実験的に確認した.
参考文献
1) 小川草太,脇元修一,神田岳文,大村健人,安藤克倫:製紐機を用いたインダクタンス型スマート人工筋の製作手法の確立,日本フルードパワーシステム学会論文集,Vol.51,No.2,p.25-31 (2020)
2) Wakimoto, S., Misumi, J., Suzumori, K.: A New Concept and Fundamental Experiments of a Smart Pneumatic Artificial Muscle with a Conductive Fiber, Sensors and Actuators A: Physical, Vol.250, p.48-54 (2016)
3) Omura, K. et al.: Development of Pneumatic Valves and a Fiber Sensor for a Smart Artificial Muscle, Proceedings of International Conference on New Actuators, p.567-570 (2018)
4) Felt, W., Chin, K. Y., Remy, C. D.: Contraction Sensing with Smart Braid McKibben Muscles, IEEE/ASME Transactions on Mechatoronics, Vol.21, No.3, p.1201-1209 (2016)
5) Kogawa, S., et al.: Composite Structure of McKibben Artificial Muscle and Optical Fiber Sensor, Proceedings of International Workshop on Piezoelectric Materials and Applications in Actuators, p.237-238 (2019)
6) 則次俊郎:流体アクチュエータ,流体アクチュエータの製造方法,流体アクチュエータを備えた筋力補助装置,及び流体アクチュエータで構成した拘束具,特開2007-68794 (2007)
著者紹介

脇元修一 君
2007年岡山大学大学院自然科学研究科博士後期課程修了.同大学助教を経て2011年同大学准教授,現在に至る.空気圧ソフトアクチュエータの開発とその応用に関する研究に従事.日本フルードパワーシステム学会,日本機械学会,日本ロボット学会,計測自動制御学会などの会員.博士(工学).
E-mail:wakimoto(at)okayama-u.ac.jp
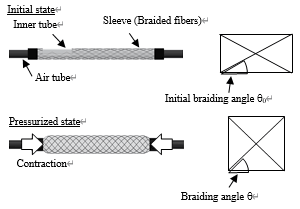
図1 McKibben型人工筋の構造と駆動原理1)
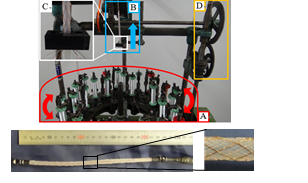
図2 製紐機による人工筋の製造(上:製紐機,下:エナメル線を有する人工筋)1)
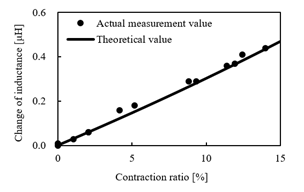
図3 収縮型スマート人工筋の収縮率とインダクタンス変化量の関係1)
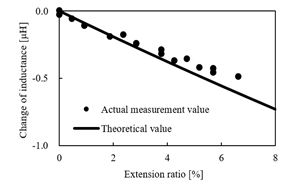
図4 伸長型スマート人工筋の伸長率とインダクタンス変化量の関係1)
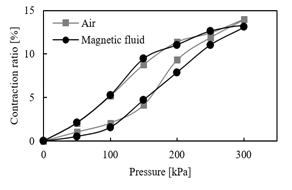
図5 作動流体を空気と磁性流体とした場合の収縮率の比較1)
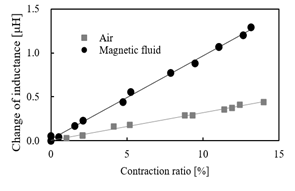
図6 作動流体を空気と磁性流体とした場合のインダクタンス変化量の比較1)