�P�D�͂��߂�
���̓x�́C�h�_������{�t���[�h�p���[�V�X�e���w�� SMC ���c�܂�����C���Ɍ��h�ł���D�܂��C���{�t���[�h�p���[�V�X�e���w��(JFPS)�̊W�҂���ы����҂ł��鉪�R���ȑ�w�̐ԖؓO�狳�����͂��ߖ{�����ɂ����͂����������F�l�ɂ́C�S��肨��\���グ��D��ܘ_���ł���uDevelopment and Attitude Control of Washable Portable Rehabilitation Device for Wrist without Position Sensor(�ʒu�Z���T���g�p���Ȃ����\�Ȍg�ь^��n�r���e�[�V�����@��̊J���Ǝp������)�v�ɂ��āC���̌����w�i��T�v���������D
�Q�D�����w�i
�@�ߔN�C�䂪���ł͏��q������65�Έȏ�̍���҂̊��������������Ă���D���̂悤�ȏ���C���x������x���V�X�e���̊J�����K�v�ƂȂ�D���̒��ŁC���n�r���e�[�V�����@��͊��҂�QOL�iQuality of Life�j���ێ��܂��͉��P���邽�߂̐g�̔\�͂̌��オ�����߂�ƍl����D�܂��C�ƒ�ł̎g�p��ړI�Ƃ��郊�n�r���e�[�V�����@��͈��S�����삪�e�Ղł���C����ɔ�p�Ό��ʂ������C�_��ȋ@��ł��邱�Ƃ��K�v�ł���ƍl����1)-3)�D�����āC�g�p��͐�邽�ߖh����h�K���K�v�ƂȂ�D�����ŁC�ƒ�Ŋ��Ҏ��g������Ŏ����ƂŎ��̃��n�r���e�[�V�������ł���@��̊J�����߂����D�ړI�Ƃ���@��́C����̉��P��ړI�Ƃ����@��łȂ��C���w�Ö@�m�iPT�j���ƗÖ@�m�iOT�j�̎{�p�ɂ���āC���P���ꂽ������ێ����邽�߂̋@�����������D�܂��C���ɑ��鎩��^���Ƃ��āC�{�[���]�����^����PT��OT�����҂Ɋ��߂Ă���D���̎���^���̗l�q��}1�Ɏ����D�������C���C�Ȃǂ̃��`�x�[�V������g�̔\�͂ɂ���ĉ^��������ȉ\��������D�����ŁC���m���Ȃ��Ɏ�Ɏ������Ŏg�p�ł��C���g�ōw���ł���قLj����ȋ@��ɂ���K�v������D�܂����S�������C���҂����|��s���Ȃǂ��������ۂɁC�@����ȒP�Ɏ�����邱�Ƃ��]�܂����D����܂ŁC���n�r���e�[�V�����@��ւ̉��p���߂����āC�_���C���V�����_��p�����_��ʃA�N�`���G�[�^���J�����Ă���4),5)�D�������C�A�N�`���G�[�^�ɂ͐������Ɋ������܂���������댯����D�^�J�����[���Ȃǂ̋������i���K�т��\��������D�܂��O���X�ȂǏ����܂�p���Ă��邽�߁C�^����̐��͍���ł���D����ɉ����ł̎g�p��������߁C���␅���ł��g�p�\�ȋ@��ɂ��Č�������D
�R�D���\�ȃZ���T���X�g�ь^���n�r���e�[�V�����@��
��q�̂悤�Ȏd�l�����ƂɁC���\�ȃZ���T���X�g�ь^���n�r���e�[�V�����@��̊J�����s���D���̃A�N�`���G�[�^�Ƃ��āC�}2�Ɏ����悤�ȐL���^�_���C���A�N�`���G�[�^�i�Ȍ�CEFPA�j���J������6),7)�DEFPA�̓V���R�[���S���`���[�u�i��-�O�a8-11�o�j���֕���̃i�C�������X���[�u�ŕ������P���ȍ\����L���C�ޗ����1 m�������600�~�Ɣ��Ɉ����ł���D���쌴���͈��͂�������邱�Ƃœ����̃`���[�u���c��邪�C�X���[�u�ɂ�莲���������̂ݕό`�ɍS������邽�߁C�ő�Ŗ�2.5�{�L�����邱�Ƃ��ł���D���̃A�N�`���G�[�^���{�p���āC�S���Ō݂��ɍS�������@����āE���삵���i�}3�j�D
�S�D�Z���T���X�p������V�X�e��
���ɁC�g���݃R���g���[���Ɛ���ق�p�����p������V�X�e����}4�Ɏ����D�V�X�e���͎��샊�n�r���e�[�V�����@���6��on/off�فi��3��3�|�[�g�فC����2�|�[�g�فj�C�����ċ@��S�̂𐧌䂷�邽�߂̑g���݃R���g���[���i�i���j���l�T�X�G���N�g���j�N�X, SH7125�j����\�������D�܂��C��Ă���@��͐��␅���ł̎g�p���ړI�Ƃ��Ă��邽�߁C�ʒu�v���p�Z���T�Ȃǂ��g�p�ł��Ȃ��D�܂��C��C���n�̃��f����p���āC�����Ȑ��w���f�����g���ĕ\���ꍇ�C��C�̈��k���Ȃǂ̔���`�v�f�������܂܂��D�����ŁC�p������̕��@�Ƃ��āC��莞�Ԃّ̕���̌J��Ԃ��ɂ�鐧����l���C�ق̒P���ȑ���ɂ��@��̋��������f�������邱�ƂŃZ���T���X�ł̏�ԗʂ̃t�B�[�h�o�b�N���s���V�X�e�����\�z����D��̓I�ɂ́C����@��̊eEFPA�̓����Ƙp�Ȋp�ω���ق̑��얈�ɑO�����Čv�����C���̌v�����ʂ���ّ���ɑ��ċ@��̋����𐄒�ł���ߎ����f�����쐬����D�ߎ����f�������߂�ۂ�1��̑���̃o���u�J�����Ԃ́C�������쎞��100ms�Ɣr�C�����200ms�ɐݒ肷��D�܂��C���r�C�Ƃ��ɓ����쓮���Ԃ��m�ۂ��邽�߁C�ێ����Ԃ��������ɂ�150ms�C�r�C���ɂ�50ms�ɐݒ肷��D���u��EFPA�ɂ�����ّ��쐔�Ɠ����ω��̊W��}5�Ɏ����D�}���̊e�L���́C���ꂼ�ꋟ���Ɣr�C���ّ̕���̌��ʂ������D�����ł́C�ق̋������͂�500kPa�Ƃ����D���̌��ʂ���C�}6�Ɏ����悤�ɁC�ّ���O�̈��͂�1��ّ̕���ɂ�鈳�͕ω��Ƃ̊W�邱�Ƃ��ł���D����ɁC���͂Ƙp�Ȋp�̊W�Ɛ}6����C�ق̑���O�̈��͂Ƌ@��p�Ȋp�ω�/���͕ω��̔䗦�Ƃ̊W��������C���̌��ʂ�}7�Ɏ����D�}7���C�e�L���́C���ꂼ��ق̋�������Ɣr�C����������D�ȏ�̊W����C�ّ���O�̈��͂��x�[�X�Ƃ��Ă��̕ω��������C�E�r�C����ɑ��ă��f�������邱�ƂŁC����ّ̕����̋@��̈��͂Ƙp�Ȋp�����̕ω����̐ϕ��ɂ���Čv�Z���邱�Ƃ��\�ƂȂ�D
�T�D�����I���f����p�����p������
�}6�C7�̌��ʂ��CEFPA�̈��͂Ƙp�Ȋp�����߂邽�߂̋ߎ����o����D�����ŁC����O�̈���![]() �̎��_�ł�1�̋��C�����̈��͕ω���
�̎��_�ł�1�̋��C�����̈��͕ω���![]() [kPa]�͎��̎��ŋߎ��ł���D
[kPa]�͎��̎��ŋߎ��ł���D

�����ŁCi��k���C���ꂼ��@�����EFPA(i = 1,2,3)�������W���ƕّ���̉��Ӗ�����D�܂����l��1��̔r�C����ɂ�鈳�͕ω�![]() �͎��̂悤�ɋ����ł���D
�͎��̂悤�ɋ����ł���D

�܂��C�ّ����̈���![]() �́C���L�̎��������g�p���Čv�Z�ł����D
�́C���L�̎��������g�p���Čv�Z�ł����D

���ɐ}7���C�ّ���ɂ��p�Ȋp/���͕ω��̊W����1��̑���ɂ�����p�Ȋp��EFPA�����ω��̔䗦(����/��![]() )�́C�ȉ��̎������ŋߎ����邱�Ƃ��ł����D
)�́C�ȉ��̎������ŋߎ����邱�Ƃ��ł����D
���C�̏ꍇ

�r�C�̏ꍇ

������1��ّ̕����̘p�Ȋp�x![]() �͎����ŋ��߂��D
�͎����ŋ��߂��D

�eEFPA�̐�������Ƃ��āC�����Ɏ����f�b�h�]�[����L����on/off����������g�p�����D

�����ŁC![]() �͊eEFPA�̖ڕW�p�Ȋp�x�������D
�͊eEFPA�̖ڕW�p�Ȋp�x�������D
�@�p������ł́C�ڕW�p���Ƃ��Ęp�Ȋp�x������90�x�ɐݒ肵�C�p�ȕ����p����5�x���Ƃ�0�`360���ω�����悤�ɐݒ肵���D�}8�́C���f����p�����p������̗l�q�������D�e�}�́C����@���������B�e�������̂ł���D�}8���C�Ԃ��j���̉~�́C�����猩�����_�ł̖ڕW�O���������D�}8����C����@��̏I�[���͖ڕW�̋O���ɉ����ē����Ă��邱�Ƃ��킩��C��Ă����ߎ����f���́C����@����O������ɓK�p����̂ɗL���ł��邱�Ƃ��m�F�ł���D�܂��C�{�@��͎��̉��悪�����Ȃ�����C���҂ɑ��đ����^����^���邱�Ƃ��ł���D����̉ۑ�Ƃ��āC���̉�������P���邱�Ƃ��ł���@��ɉ��ǂ��邽�߂ɁC�h�����̂���͂�Ȃ��Z���T�̊J�����K�v�ł���D�܂��C�u�ɊǗ��̂��߂Ƀ}�X�^�[�X���[�u����̓K���������������D
�Q�l����
1�j Nagata, Y. ed.: Soft Actuators, Forefront of Development, NTS Ltd., p. 291-335 (2004)
2�j Ishii, M., Yamamoto, K. and Hyodo, K.: Stand-Alone Wearable Power Assist Suit, Development and Avail-ability, Journal of Robotics and Mechatronics, Vol. 17, p. 575-583 (2005)
3�j Kobayashi, H., Shiban, T. and Ishida, Y.: Realization of all 7 motions for the upper limb by a muscle suit, Journal of Robotics and Mechatronics, Vol. 16, p. 504-512 (2004)
4�j Matsui, Y., Akagi, T., Dohta. S., Aliff, M. and Liu, C.: Development of Portable Rehabilitation Device Using Flexible Spherical Actuator and Embedded Controller, Lecture Notes in Electrical Engineering 293, Volume 1, Springer, p. 231-238 (2014)
5�j Matsui, Y., Akagi, T., Dohta. S., Kobayashi, W., Tamaki, H.: Development of Flexible Spherical Actuator with 3D Coordinate Measuring Device, Journal of Flow Control Measurement & Visualization, Vol. 6, No. 2, p. 95-106 (2018)
6�j Suzuki, Y., Akagi, T., Dohta, S., Kobayashi, W., Tamaki, H., Matsui, Y. and Shimooka, S.: Development of Tetrahedral Type Rehabilitation Device Using Flexible Pneumatic Actuators, International Journal of Mechanical Engineering and Robotics Research, Vol. 7, No. 4, p. 409-414 (2018)
7�j Shimooka, S., Akagi, T., Dohta, S., Kobayashi, W and Shinohara, T.: Improvement of Home Portable Rehabilitation Device For Upper-Limbs, JFPS International Journal of Fluid Power System, Vol. 12, No. 1, p.10-18 (2019)
���ҏЉ�

�������@�N
2020�N���R���ȑ�w��w�@�H�w�����Ȕ��m�ے�(���)�V�X�e���Ȋw��U�C���D���N���]�H�ƍ������w�Z�d�q����H�w�ȏ������o�āC���R��w�w�p�����@���R�Ȋw�w�揕���ƂȂ�C���݂Ɏ���D�\�t�g�A�N�`���G�[�^��p������ÁE�����@��̌����ɏ]���D���{�t���[�h�p���[�V�X�e���w��C���{�@�B�w��Ȃǂ̉���D���m(�H�w)�D
E-mail�Fshimooka(at)okayama-u.ac.jp
![�}1�@�{�[���]�����^��](009.files/image030.png)
�}1�@�{�[���]�����^��
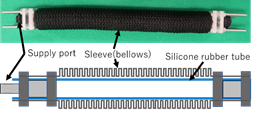
�}2�@EFPA�̊O�ςƍ\��
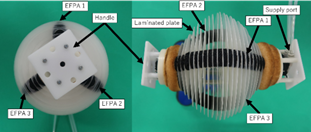
�}3�@ �|�[�^�u�����n�r���e�[�V�����@��̊O��
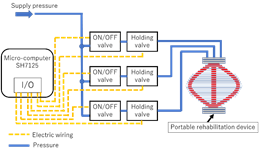
�}4�@�p������V�X�e���̍\��
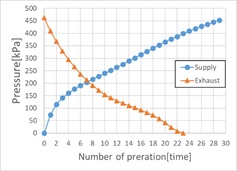
�}5�@���r�C�̑���Ɠ����ω��̊W
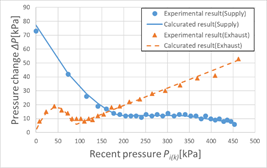
�}6�@�ّ���O�̈��͂Ƒ���ɂ�鈳�͕ω��̊W
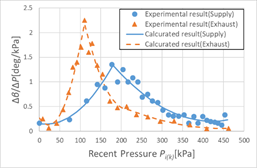
�}7�@�ّ���O�̈��͂Ƙp�Ȋp�ω�/���͕ω��̊W
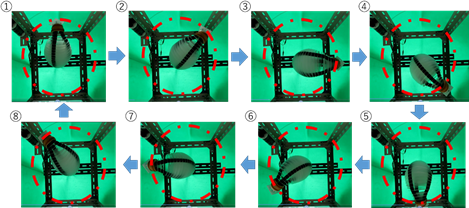
�}8�@�@��ɂ��p������̗l�q