�P�D�͂��߂�
���̂��т́C�h�_������{�t���[�h�p���[�V�X�e���w�� SMC ���c�܂�����C���ɂ��肪�Ƃ��������܂��D�܂��C���{�t���[�h�p���[�V�X�e���w��(JFPS)�̊W�҂̕��X�C�Ȃ�тɋ����҂ł��鉪�R���ȑ�w�̐ԖؓO�狳���͂��ߖ{�����ɂ����͂����������F�l���ɐS��芴�Ӑ\���グ�܂��D��ܘ_���ł���uDevelopment of Small-sized Servo Valve using Gate Mechanism and Diaphragm �i�Q�[�g�@�\�ƃ_�C���t������p�������^�T�[�{�ق̊J���j�v�ɂ��āC���̌����w�i��T�v����������Ă��������܂��D
�Q�D�����w�i
�@�ߋ�10�N�ԂŁC�E�F�A���u����C���쓮�V�X�e���͑����̌����҂ɂ�茤������Ă���D���̃V�X�e���ł́C����ق̑傫���ƃR�X�g�͊J����̑傫�Ȗ��ƂȂ�D����́C��C���V�X�e���ōł������Ȑ���@�킪����قł��邱�ƂɋN������D�Ⴆ�C�T�^�I�ȓd���T�[�{�قł́C�V�[����ۂ��Ȃ���X�v�[���������G�ȍ\���ƂȂ邽�߃R�X�g���ƂȂ�C��R�X�g�̃T�[�{�ق͏d�v�ȉۑ�ł���C�����̌����҂��J�����s���Ă����D�����̑����̓I���I�t������s������قł���C�Ԍ��I�ȗ��ʒ������s�����̂���ł������D�����ʼn�X�͈ȑO�̌����ŁC���ȃ`���[�u�̋Ȃ��p�x��������RC�T�[�{���[�^�ŕς��邱�Ƃŗ��ʂ𐧌�ł����R�X�g�T�[�{�ق��J�����C�S���l�H�ؓ��̈ʒu���ߐ���։��p�����D�������C���̕ق͋��ȃ`���[�u�̑ϋv���Ƃ�������L����ƂƂ��ɁC�ق̒x�����C���[�^���x�ƃI�[�o�[���b�v�]�[���̑傫���Ɉˑ�����Ƃ������Ƃ��킩�����D�����Ŗ{�_���ł́C���[�^�̉�]�p�x���������C�o���u�̊J�𐧌�ł���ϋv���̂���J�@�\��L�����R�X�g�قƂ��āC�Q�[�g�@�\�ƃ_�C���t������p�����ق̊J�������������D�܂��C��Ă����قƋ��ȃ`���[�u��p�����ق��g�p�����ꍇ�̈ʒu���ߐ��䌋�ʂȂǂɂ��ďq�ׂ�D
�R�D���ȃ`���[�u��p������R�X�g�T�[�{��
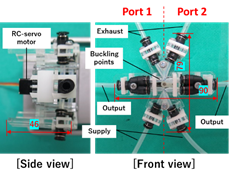
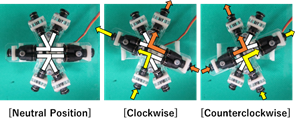
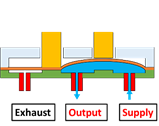
�}1�ɁC�ȑO�J���������ȃ`���[�u��p����4�|�[�g�^�T�[�{�ق̍\���������D�ق́C4�̍���������|���E���^���`���[�u�i���a2.5�o�C�O�a4�o�j�C4�̃X�g���[�g�R�l�N�^��2��Y���^�R�l�N�^�C���^RC�T�[�{���[�^�Ɖ�]�f�B�X�N����\������C�ق̎��ʂ�73g�C�T�C�Y��90�~79�~53�o�ł���D�}2�ɕق̓��쌴���������D�}2�̒����Ɏ����悤�ɁC���[�^�����v���ɉ�]����ƁC�����̔r�C�p�`���[�u�ƉE���̋����p�`���[�u�̋��Ȋp�x���������C�����̃`���[�u�����S�ɕ�����D����Ɠ����ɁC�����̋����`���[�u�ƉE���̔r�C�p�`���[�u�̋��Ȋp�x���������C�����̃`���[�u�̊J���ʐς́C���[�^�̉�]�p�ɉ����đ�������D����ɂ��C�����̏o�̓|�[�g�͋����|�[�g�Ƃ��āC�E���̏o�̓|�[�g�͔r�C�|�[�g�Ƃ��ċ@�\����D�܂��}2�̉E���Ɏ����悤�ɁC���[�^�������v���ɉ�]����ƁC�����̏o�����r�C�|�[�g�Ƃ��ċ@�\���C�E���̏o���������|�[�g�Ƃ��ċ@�\����D�ȏ�̂悤�ɋ��ȃT�[�{�ق́C2�̏o�̓|�[�g����̋������ʂƔr�C���ʂ̗��������ăA�i���O�I�ɐ���ł���D
�S�D�Q�[�g�@�\��p�����T�[�{��
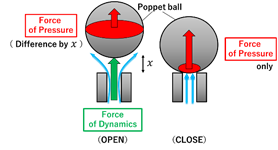
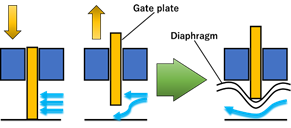
��L�̃T�[�{�ق́C�J���ʐς�ς��邽�߂ɍ����`���[�u�ɑ傫�ȕό`�������邽�߁C�ϋv���ɖ�肪����D�܂��C�悭�p������}3�Ɏ����C�|�y�b�g�ɂ��J���ʐς�ς���ꍇ�C���̂̈��͂Ɖ^���ʂɂ��C�J�̏u�ԁC�|�y�b�g�ւ̔��͂��傫���ω����C���[�^�̉�]�p�ɔ�Ⴕ�����ʐ��䂪����ɂȂ�D���̂��߁C�J�ɂ�锽�͂̉e�������Ȃ��V���ȊJ�@�\���l����K�v������D�����ŁC�{�_���ł́C�}4�Ɏ����Q�[�g����ɂ����V�����J�����@���Ă����D���̃Q�[�g�@�\�́C�������͂◬�̗̂���̉^���ʂ̉e�����邱�ƂȂ��C�����ȗ͂ŃQ�[�g�𑀍�ł��C�Q�[�g�̕ψʂɔ�Ⴕ�ĊJ���ʐρi���ʁj�𐧌�ł���D�{�����ł́C�Q�[�g�Ɨ��H�̊Ԃ̃V�[�������ʓI�Ɉێ����邽�߁C�_�C���t��������ĊJ����@�\���l�Ă����D�}5�ɁC�Q�[�g�@�\��p��������ق̊T���������D����ق́CRC�T�[�{���[�^�C2�̃R�C���X�v�����O���������]�f�B�X�N�C4���̃Q�[�g�������2�̃Q�[�g���j�b�g�ō\�������D��]�f�B�X�N��RC�T�[�{���[�^�̎��ɐڑ�����C2�̃Q�[�g���j�b�g�Ԃɔz�u����D�}6�ɁC�Q�[�g���j�b�g�̊O�ςƕ���}�������D�Q�[�g���j�b�g�́C��2.4�o�C�[��1�o��V���^�a���{�����������̃Q�[�g�v���[�g�ƃx�[�X�v���[�g�C����0.5�o�̃V���R�[���S���V�[�g�C2���̎������Q�[�g�C3�̃R�l�N�^����\�������D�_�C���t�����́C�Q�̃v���[�g�̊Ԃɋ��܂�C�Q�[�g�v���[�g����2�̌��ɃQ�[�g�����t������D�}7�ɁC�Q�[�g�@�\�ƃ_�C���t������p��������T�[�{�ق̊O�ςƂ��̕���}����щ�]�f�B�X�N�̍\���������D�ق�2�̃Q�[�g���j�b�g��3D�v�����^�Ő��삵����̌^�t���[���Ɏ��t�����C���t���[���ɉ�]�f�B�X�N�̕t����RC�T�[�{���[�^���ݒu����Ă���D��]�f�B�X�N�́C1�̃R�C���o�l����ė����̃Q�[�g�������\����L����D����ق̃T�C�Y��31�~46�~43�o�C���ʂ�39g�ƈȑO�̕قɔ�ה������x�Ə��^�E�y�ʂł���D�}8�Ɏ���T�[�{�ق̓��쌴���������D�}�͍����狋�C�C�ێ��C�r�C��Ԃ������C�ێ���Ԃł͒����ʒu�ɂ����]�f�B�X�N�������Ă���D�����āC���C�Ɣr�C�ł̓f�B�X�N�͂��ꂼ�ꔽ���v���Ǝ��v���ɉ�]����D�ق̓��쌴���́C�}8�����̃f�B�X�N�������ʒu�ɂ���ꍇ�C�f�B�X�N��4�̃Q�[�g���ϓ��ɉ����C�e�Q�[�g�@�\�������Ԃ��ێ�����D�}8�̍��Ɏ����悤�ɁC�f�B�X�N�������v���ɉ�]�����ꍇ�C�|�[�g�P�̔r�C���̃Q�[�g������ɉ����t�����C�t�ɁC�������Q�[�g�̉��t�͂��������C�_�C���t�����ɂ���ăQ�[�g�������߂���邱�ƂŃQ�[�g�@�\���J�����C������s���D���l�ɁC�|�[�g2�͔r�C�Ƃ��ċ@�\����D�Ȃ��C�Q�[�g�ƃf�B�X�N�̊w�I�W����C�Q�[�g�J�����̒f�ʐς̓f�B�X�N�̉�]�p�ɔ�Ⴗ��D�܂��C�}8�E�Ɏ����悤�ɁC�f�B�X�N�����v���ɉ�]����ƁC�|�[�g1�͔r�C�C�|�[�g2�͋��C�Ƃ��ċ@�\����D
�T�D�ٓ����ƃV�����_�̈ʒu���ߐ���ւ̉��p
�}9�ɁC����ق̃��[�^��]�p�ƃ|�[�g1�i☐�j��2�i�Z�j����̏o�͗��ʂ̊W�������D�����Ɣj���́C���[�^�����ꂼ�ꔽ���v���Ǝ��v���ɉ�]�����ꍇ�������D�}9�Ɏ����悤�ɁC����ق̓Q�[�g�̒�����ς��邱�ƂŃI�[�o�[���b�v�]�[���͈̔͂��ł��C���[�^�̐U�����l�������}3���̃I�[�o�[���b�v�]�[����ݒ肵���D�}9����C�����ʒu����11���̊p�x�ω��ōő嗬��50 L/min�iANR�j�������邱�Ƃ��킩��D�����ŁC�����ł̘R�ꎎ�����玎��ق͒����ʒu�ɂ����ċ�C�R�ꂪ�Ȃ����Ƃ��m�F���Ă���D�܂��C�ق̓������]���̂��߁C�}10�ɕق����r�C�����ꍇ�̏o�͈��͂̎��ԕω��������D �}10����C���C���̂ނ����Ԃ�43.8 ms�C�r�C����45.1 ms�ł���D�܂��C�S���C/�S�r�C�֑̐ؑ���ɂ�鎎��ق̎��g��������}11�Ɏ����D�}����C�ق̑ш敝���g���̓Q�C�����}�����9 Hz�ł���C���苤�U�p���g���͈ʑ����}�����28 rad/s�ł��邱�Ƃ��킩��D ���̌��ʂ��玎��ق�1Hz���x�̓��������K�v�ȋ�C���\�t�g�A�N�`���G�[�^�ɗp�����E�F�A���u���쓮�V�X�e���ɏ\���K�p�\�ƍl����D�}12�ɁC����ق�p������C���V�����_�i���a16 mm�C�X�g���[�N100�o�j�̑��_�ʒu���ߐ��䌋�ʂ������D�����PID���䑥��p���C���Q�C���F1.78 ��/�o�C�����Q�C���F25.4 ��/�o�C�ϕ��Q�C���F3.00�~10-4 ��/�o�Ƃ��C�I�[�o�[���b�v�]�[���̕�Ƃ���0.119 ����ʏ��PID������͂ɏ�悹�����D�}12����C���덷�̕W������0.78 �o�Ə������C�I�[�o�[�V���[�g���Ȃ��C��r�I���x�悭�Ǐ]���䂪�����ł��Ă��邱�Ƃ��킩��D
�U�D������
�ȑO�̋��ȃ`���[�u��p���������ȃT�[�{�قɑ��āC���ϋv���̂���J�@�\�Ƃ��āC�_�C���t�����𗘗p�����Q�[�g�@�\���l�Ă��C������RC�T�[�{���[�^��p���������ȃT�[�{�ق��āE���삵���D�܂��C����ق̃��[�^��]�p�Əo�͗��ʓ�������C����ق�2�̏o�̓|�[�g����̗��ʂ����ăA�i���O�I�ɒ����\�ł��邱�Ƃ��m�F�����D�܂��C����ق̎���39g�ƈȑO�̋��ȕق̔������x�ł���C��]�p11���ōő嗬��50 L/min�iANR�j������ꂽ�D�܂�����قɂ���C���V�����_�̑��_�ʒu���ߐ��䌋�ʂ���C���Ǐ]���̕W������0.78 mm�Ɣ�r�I���x�悭�ʒu���߂ł��邱�Ƃ��킩�����D�܂��ق̓�������������C�ق̂ނ����Ԃ́C���C��44 ms�C�r�C��45 ms�ł��邱�Ƃ�C���g��������������C����ق̑ш���g���̓Q�C���}�����9 Hz�ł���C���苤�U�p���g���͈ʑ��}�����28 rad/s�ł��邱�Ƃ��m�F�����D���������āC����ق́C��1 Hz�̓�������K�v�Ƃ����C���\�t�g�A�N�`���G�[�^���g�p�����E�F�A���u���쓮�V�X�e���ւ̉��p�ɖ𗧂��̂ƍl����D�ȏ�C����̎�܂��āC��C���쓮�V�X�e���̏d�v�ȗv�f�ł���T�[�{�ق̏��^���ƒ�R�X�g���Ɍ������V���ȕق̊J���ɏ]������ƂƂ��ɁC�َ��̂̐��\���P�Ɋւ��Ă����㌟���������ƍl���Ă��܂��DSMC���c�܂�����C���ɂ��肪�Ƃ��������܂����D�d�˂Ă���\���グ�܂��D
���ҏЉ�
 ���₵������
���₵������
���ё얤�@�N
2022�N���R���ȑ�w��w�@�H�w�����Ȓm�\�@�B�H�w��U�C���C���N�C���m�ے�(���)�V�X�e���Ȋw��U�ɓ��w�C�ߘa4�N�x���{�w�p�U����̓��ʌ������iDC1�j�ɍ̑��C���݂Ɏ���D��R�X�g�E���^����ق̊J���ɏ]���D���{�t���[�h�p���[�V�X�e���w��̉���D�C�m(�H�w)�D
E-mail: t22sd27qs(at)ous.jp
 �}1�@���ȃ`���[�u��p�������^�T�[�{�� |
 �}2�@����T�[�{�ق̓��쌴�� |
 �}3�@�|�y�b�g�^�ق̊J���̔��� |
 �}4�@��Ă���Q�[�g�@�\�̃��f�� |
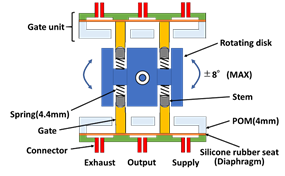 �}5�@�Q�[�g�@�\�ƃ_�C���t������p�����T�[�{�� |
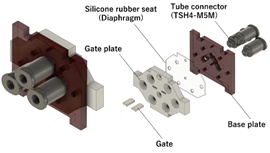 �}6�@�Q�[�g���j�b�g�̊O�ςƕ���} |
 �@ �@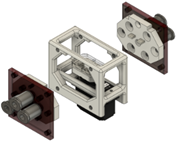 �@ �@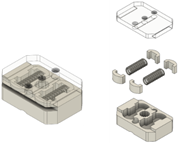 �}7�@�Q�[�g�@�\�ƃ_�C���t������p�����T�[�{�ق̊O�ςƕ���}����щ�]�f�B�X�N�̍\�� |
 �@ �@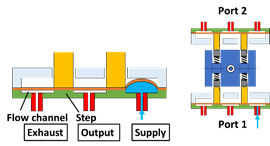 �@ �@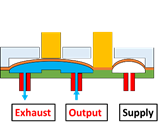 �}8�@����T�[�{�ق̓��쌴���i�����狋�C�C�ێ��C�r�C��ԁj |
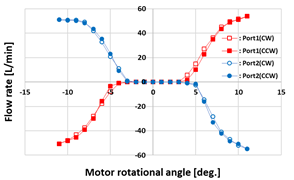 �}9�@���[�^��]�p�x�Ɨ��|�[�g�̏o�͗��ʂ̊W |
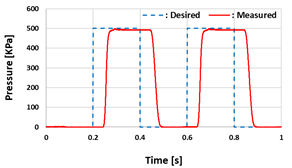 �}10�@�S���C/�r�C���쎞�̏o�͈��͕ω� |
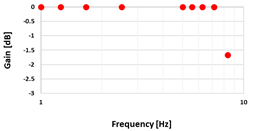 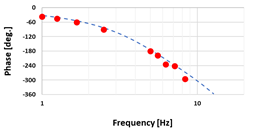 �}11�@����T�[�{�ق̎��g���������ʁi���F�Q�C�����}�C�E�F�ʑ����}�j |
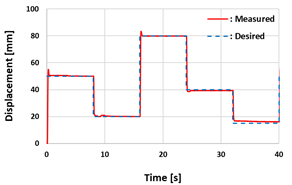 �}12�@��C���V�����_�̑��_�ʒu���ߐ��䌋�� |