1.はじめに
このたび,日本フルードパワーシステム学会の推薦により油空圧機器振興財団論文顕彰をいただいたこと,心より感謝申し上げる.顕彰いただいた論文はJFPS International Journal of Fluid Power Systemに掲載された著者Ha Tham Phan,佐藤恭一の「Improving the Overall Efficiency of an Electro-hydraulic Drive System by using Efficiency Maps」1)であり,筆頭著者のHa Tham Phanが横浜国立大学大学院博士課程在学時にまとめ上げた博士論文2)を構成する公表論文の一つである.Phanは,ベトナムからの留学生で,2018年10月に横浜国立大学大学院博士課程に入学,2021年9月に大学院を修了し,博士(工学)の学位を取得した.現在は国内メーカーの技術者として活躍している.
筆者の研究室では,当論文を起点とする応用研究を現在も継続しており,今回の顕彰は,著者のみならず,当研究テーマに関わる研究室スタッフ全員の研究遂行の励みとなっている.
以下,本稿では顕彰いただいた「Improving the Overall Efficiency of an Electro-hydraulic Drive System by using Efficiency Maps」について,論文の概要を紹介させていただく.
2.「Improving the Overall Efficiency of an Electro-hydraulic Drive System by using Efficiency Maps」の概要
2.1 背景と目的
本研究では,電動モータと油圧ポンプからなる電動油圧駆動システム(EHDS:Electro-Hydraulic Drive System)において,電力から回転速度・トルクの機械動力に変換するモータ駆動装置と,機械動力を負荷が必要とする圧力・流量の流体動力に変換する油圧ポンプの両者の動力伝達効率の優良運転点を探索することにより,全効率を向上することを目的とする.EHDSの全効率を向上させる方法の一つとして,モータとポンプによる制御弁を用いない負荷流量,負荷圧力制御を行うバルブレスEHDS(図1)が提案され,実用化されているものもある.このバルブレスEHDSの特徴は,油圧動力伝達系でのリリーフ動力損失,油圧制御バルブでの絞り動力損失を排除できることである.バルブレスEHDSには,負荷への流体動力を制御する複数の方法がある.表1に示す「可変速度モータ」と「固定容量油圧ポンプ」(VS-FP:Variable-Speed motor and Fixed-displacement Pump),「固定速度モータ」と「可変容量油圧ポンプ」(FS-VP:Fixed-Speed motor and Variable-displacement Pump),「可変速度モータ」と「可変容量油圧ポンプ」(VS-VP:Variable-Speed and Variable-displacement Pump)などである.FS-VPおよびVS-FPはモータ速度制御またはポンプ容量制御のどちらかの1自由度制御であり,VS-VPはモータ速度,ポンプ容量の2自由度制御となる.本研究では,サーボモータと油圧ポンプの効率マップを利用して,すべての動作点でこれらのコンポーネントの仕様を適切に実行できるようにすることで,EHDSの全効率を改善する方法を提案する.これらのコンポーネント間の相互作用は,シミュレーションデータに基づく各コンポーネントの効率マップの組み合わせで表現される全効率マップに基づく.
2.2 EHDSコンポーネントの効率と優良運転点の探索
本研究で対象とするEHDSは,サーボモータシステムと斜板式可変容量ピストンポンプで構成されており,システムの全効率は,各コンポーネントの運転点における効率に依存する.まず,サーボシステムとポンプの効率を物理モデル,数学モデルで表現し,それらに効率実測で得られたパラメータを導入することで,各コンポーネント固有の効率マップを獲得した. ポンプ効率マップの作成においては,複雑さの回避と制御系への実装時のマップデータ数の低減のため,最大容量と設定容量の比である容量比を離散パラメータ(連続でない値)として分割し,17段階の容量比毎にポンプ効率マップを作成した.一方,サーボモータシステムの効率は,実機でも計測可能な入力電力と出力動力(回転速度実測,サーボモータコントローラから得るトルク)の比となるので,回転速度とトルクの2変数による単一の効率マップとした.モデルと実験パラメータから取得したサーボモータシステムと油圧ポンプの効率マップ(容量比αの値は一例)をそれぞれ図2と図3に示す.図2のサーボモータシステム効率マップに示すように,モータ速度が定格値1500rpm付近,出力トルクが10 Nm付近で,モータは高効率運転となる.また,低速域や低トルク域ではモータ効率が急激に低下する.最大容量比(α= 1)での油圧ポンプの効率は,運転域全域にわたって容量比1未満の効率よりも高くなる傾向から,ポンプの効率を上げるためには、油圧ポンプを最大容量で運転するのが適切である.ただし、目標流量Qに対して,モータ速度とポンプ容量比αの組み合わせがあるため,例えば,油圧ポンプ容量比を上げ,α= 1で運転してポンプ効率を上げる場合も,目標流量Qの実現のためにモータ速度を下げる必要がある.これにより、モータ効率と全効率が低下する.この問題は,モータ速度固定のFS-VPおよびポンプ容量固定のVS-FPの1自由度制御で,最適運転点から動作点が移動してコンポーネントの効率が低下する場合に生じる.EHDSの全効率を評価する場合,モータ速度と油圧ポンプの容量比αの間の相互作用をEHDS動作範囲で考慮した,モータ効率マップ,ポンプ効率マップを統合したEHDS全効率マップを利用することで解決できると考えられる.
EHDSの全効率は,サーボモータシステムの効率と油圧ポンプの効率の積となる.図4に示すように, EHDSの全効率マップは,サーボモータシステム(アンプとモータ)と油圧ポンプの効率マップの座標軸を組み合わせることによって作成される.一例として,図5にサーボモータシステムの効率マップとある容量比の油圧ポンプの効率マップを組み合わせた全効率マップを示す.表2より,EHDSの全効率は容量比α= 0.5で最大効率となるが,この場合,サーボモータシステムと油圧ポンプは,コンポーネント単独で見た場合はそれぞれの最大効率となっていない.これは,α= 1の場合の油圧ポンプの効率はα= 0.5の場合よりも高いものの,目標流量の実現にはモータ速度を低速にするため,サーボモータシステムの効率が低下し,結果としてEHDSの全効率が低下したことによる.
「可変速度モータ」と「可変容量油圧ポンプ」(VS-VP:Variable-Speed and Variable-displacement Pump)のEHDSの全効率を向上するため,図6に示す制御システムにおいて,モータ速度nmと容量比αを同時に制御するする.このシステムの目標は,全効率マップのデータに基づいて,指定された流体動力(ポンプ吸い込み・吐出圧力差Δp,流量Q)に対してnmとαを調整することにより,全効率を最適化することである.すなわち,Δpの特定の値に対して,コントローラーは17の全効率マップ(α=αi, i=1~17)を用意し,作動範囲などの特定の制約を考慮しながらこれらの値を比較し,最高効率となった全効率マップから動作点(nm,α)が決定する.この動作点でEHDSのモータ速度と容量比を制御する.
2.3 シミュレーション評価
提案した制御方法の利点を評価するため,サーボモータシステムとポンプで構成されるEHDSについて,3つのケースの全効率のシミュレーションを実施した.通常,油圧ポンプ駆動の固定回転速度モータとしては誘導電動機が使用される.誘導電動機の効率は,全動作範囲でサーボモータの効率よりも低いため,本研究ではモータを統一して3ケースとも同じ仕様のサーボモータとした.
ケース1:(VS-FP)可変速度モータと固定容量油圧ポンプ(α:最大容量比で固定運転)
ケース2:(FS-VP)固定速度モータと可変容量油圧ポンプ(nm:定格回転数で固定運転)
ケース3:(VS-VP)可変速度モータと可変容量油圧ポンプ
負荷へのポンプ吐出流量を制御する流量制御モードと,圧力を制御する圧力制御モードに関するシミュレーション結果を,それぞれ図7と図8に示す.なお,論文では,流量制御モードでの設定圧力,圧力制御モードでの設定流量を複数の条件でシミュレーションしており,図7,図8はその一例である.流量制御モード(図7)では,ケース3のVS-VPユニットは、nmとαの2自由度制御により,動作点においてケース1,2の全効率を下回ることはなく.優れた全効率を示した.VS-VPユニットの利点は,特に低流量範囲で顕著に示されている.圧力制御モード(図8)においても,ケース3のVS-VPユニットは,すべての動作点においてケース1,2の全効率を下回ることはなく,優れた全効率を示した.
3.おわりに
本論文では,さまざまなEHDSコンポーネントの効率と,これらのコンポーネントが全効率に与える影響を考慮して,効率マップを用いたEHDSの全効率を改善する制御方法を報告した.提案制御方法は,モータ,ポンプの効率表現モデルで構成される全効率マップをもとに,動作パラメータ(モータ速度とポンプ容量比)の最適化された値を決定し,特定の動作点で高効率運転を実現するものである.本論文の発表以降も,VS-VPのEHDS実機を用いた効率測定により,提案制御方法の有効性を検証することを継続している3).
参考文献
1) Ha Tham PHAN, Yasukazu SATO, Improving the Overall Efficiency of an Electro-hydraulic Drive System by using Efficiency Maps, JFPS International Journal of Fluid Power System, Vol. 14, Issue 1, p.10-18 (2021)
2) HA THAM PHAN, Study on high efficiency electrohydraulic drive system using a servo motor driven variable speed, variable displacement hydraulic pump (サーボモータ駆動可変速・可変容量油圧ポンプを用いた高効率電動油圧駆動システムに関する研究), 横浜国立大学 博士論文, 甲第2239号 (2021-09-17)
3) Ha Tham Phan, Yasukazu Sato, Experimental Validation of Improvement of the Overall Efficiency for Electro-hydraulic Drive System using Efficiency Maps, Proceedings of the 11th JFPS International Symposium on Fluid Power HAKODATE 2020, Paper No. GS2-06 (2021)
著者紹介
 さとうやすかず
さとうやすかず
佐藤恭一 君
1992年横浜国立大学大学院工学研究科博士課程修了.同大学講師,准教授を経て,2012年同大大学院工学研究院教授,現在に至る.油圧動力の伝達,制御,メカトロニクスに関する研究に従事.日本フルードパワーシステム学会,日本機械学会,自動車技術会などの会員.博士(工学).
E-mail:sato-yasukazu-zm(at)ynu.ac.jp
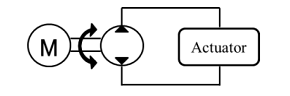 図1 バルブレス電動油圧駆動システム |
表1 各種電動油圧駆動システム 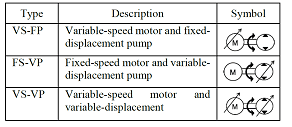
|
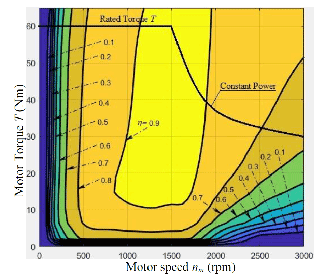 図2 モデルと実験パラメータから取得したサーボモータシステムの効率マップ |
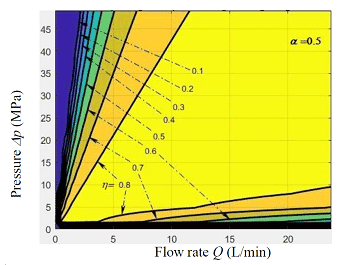 図3 モデルと実験パラメータから取得したポンプの効率マップの一例(容量比α=0.5の場合) |
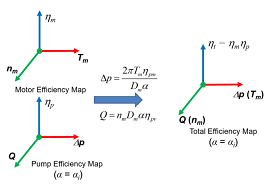 図4 EHDSの全効率マップの作成(圧力Δp,流量Q,トルクT,回転速度n,最大押しのけ容積D,容量比α,添え字m:モータ,p:ポンプ |
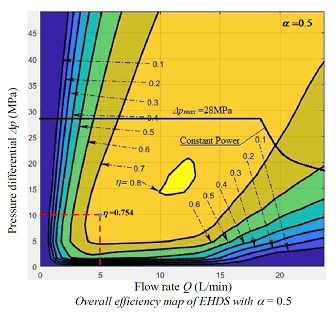 図5 EHDSの全効率マップの一例 (容量比α=0.5の場合) |
表2 ある運転点(Q=5L/min,Δp=10MPa)における容量比αごとのEHDSの全効率の例 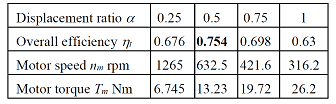 |
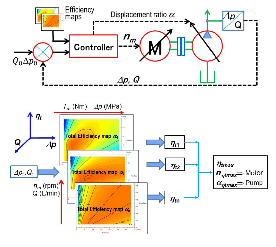 図6 EHDSのモータ速度,ポンプ容量の2自由度制御システム |
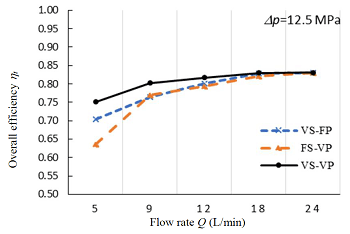 図7 流量制御モードの各種EHDSの全効率の一例 (圧力Δp=12.5MPaで流量Qを5〜24L/minの範囲で変化させた場合) |
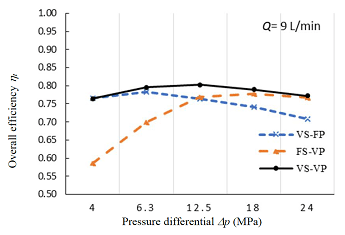 図8 圧力制御モードの各種EHDSの全効率の一例 (流量Q=9L/minで圧力Δpを4〜24MPaの範囲で変化させた場合) |