1.はじめに
この度は,栄誉ある日本フルードパワーシステム学会本学会SMC高田賞を賜り,誠に光栄である.受賞にあたり,東京工業大学の只野耕太郎先生をはじめ,本研究に対してご指導・ご協力いただいた関係各位に深く御礼申し上げる.本稿では,受賞論文である「剛性可変指モジュールを用いた空気圧駆動高性能ロボットハンド」について研究背景や概要を解説する.
2.研究背景と目的
現在,ロボットのエンドエフェクタとして1自由度の平行グリッパが多く使用されている.単純な構造で堅牢性も高いが,適用可能なタスクが限られる.また,柔軟物把持などが難しいことやワークの位置・形状誤差などの環境の変動を吸収する仕組みを有していないため,非構造化環境での運用に適さない.一方,研究機関を中心にさまざまなロボットハンドが研究されてきた.複数の指や工夫された機構,多くのセンサが搭載され汎用性や機能面では優れたものが多い.しかし,ロボットハンドには外部環境との力を介したインタラクションが要求されるため,これらの複雑な構成をもつロボットハンドは耐故障性やメンテナンス性など実用上の課題が多く,ロボットの適用可能な範囲を制限する一因でもある.そこで本研究では,メンテナンス性に優れた簡素な構造で,柔軟物把持や環境変動への対応が可能なロボットハンドの実現を目的とした.
3.ロボットハンドの設計指針
ロボットハンドを非構造化環境で運用するためには,把持力の検出やコンプライアンスの調整が求められる.これらを力センサレスで実現できることから着目したのが空気圧駆動である.さらに,軽量で単純な構造ながら高い把持力が見込めること,生産現場では圧縮空気が確保しやすいことも理由である.また,把持よりも複雑なタスクを実行させるには,把持力だけでなく複数自由度を持つ指の指先位置も高精度に制御できる必要がある.ロボットハンドを柔軟物で構成すると包み込むような把持は容易であるが,多自由度化や高い位置制御性を備えることは難しい.
本研究では5節リンク機構を2本の空気圧シリンダで駆動し,モジュール構成とした指を提案した.図1に指モジュールの概略構成を示す.5節リンク機構により2自由度で高い位置制御性が期待できるとともに,ワイヤを用いずにシリンダで直接リンクを駆動するため耐久性に優れる.また,指部分と駆動装置が分離された構造であるためメンテナンス性が高く,指部分のみの再設計やモジュールの組み合わせ変更など拡張性も有する.本論文ではロボットハンドの構成は,最小構成である2指とした.小型の産業用マニピュレータに搭載して搬送作業や組立作業を行うことを想定し,ロボットハンド本体の質量は0.8kg程度,把持力は 20N程度を目標とした.図2に開発したロボットハンドの外観を示す.
図3にインピーダンス制御系のブロック線図を示す.空気圧駆動手術支援ロボットに採用されたもの1)をベースにしており,力センサレスに把持力検出や力制御も可能である.ロボットハンドを小型化するため,バルブおよび圧力センサはロボットハンドから離れた場所に配置した.配置場所はロボットアームの機体内を想定している.
4.空気圧駆動ロボットハンドの指先剛性変更実験
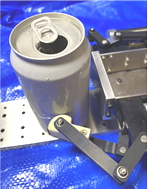
提案したロボットハンドが,柔軟物などの変形しやすいワークを把持する作業から,把持力を必要とする作業まで対応可能であることが示すため,把持方向の剛性を0.5N/mmとした状態で変形しやすいワーク(空き缶 φ53)と接触させた後に,把持方向の剛性を10.0N/mmに変化させて把持力を増大させる実験を行った.ワークの正確な大きさは未知として指間距離が36mmになるよう各指に位置目標値を与えている.なお,バルブへの供給圧力は500kPaとした.図4に指間距離と左右の指モジュールの把持力(把持方向の力参照値),図5に実験の様子を示す.指間距離は1.0s前後で53mmから変化しなくなっており,これは指先がワークを潰さずに接触を保っていることを示している.このときワークに与える力は5N以下に抑制できている.次に,3.0sから5.0sにかけて把持方向の剛性を0.5N/mmから10.0N/mmに一定レートで変化させたことで把持力が22Nに増大した.これに伴いワークが潰れ,指間距離は53mmから40mmに変化した.
実験結果より,提案したロボットハンドが剛性を可変にできることが確認できた.また,質量は0.72kg,把持力は20N以上であることから27.8以上の把持力重量比を達成した.ロボットハンドを 3指ハンド,5指ハンドとして構成した際の予想値も含め,先行研究2)-6)との比較を図6に示す.指の本数や機械的な構成の違いがあること,把持力が指の配置や把持姿勢にも依存することなどから一律な比較は難しいが,提案したロボットハンドが高い把持力重量比を有していることがわかる.
5.おわりに
本稿では「剛性可変指モジュールを用いた空気圧駆動高性能ロボットハンド」について,研究背景や概要を解説した.提案したロボットハンドが力センサレスに剛性を可変にできるとともに,高い把持力重量比を確保できることを実験により確認した.その他,位置制御性の確認8)や図7に示す把持方向と挿入方向の自由度を用いたケーブル挿入タスク8),図8に示すスナック菓子のようなサイズにばらつきがある脆性物の把持を可能にする機能追加8)を実施しており,柔軟物把持や環境変動への対応をメンテナンス性に優れた簡素な構成で実現した.提案したロボットハンドは幅広いタスクへの展開が期待でき,ロボットの適用範囲の拡大が期待できる.
参考文献
1) Tadano, K., Kawashima, K.: Development of a Master Slave Manipulator with Force Display using Pneumatic Servo System for Laparoscopic Surgery, Proceedings of 2007 IEEE International Conference on Robotics and Automation, p. 947–952 (2007)
2) Kawasaki, T., Komatsu, T., Uchiyama, K.: Dexterous anthropomorphic robot hand with distributed tactile sensor: Gifu Hand II, IEEE/ASME Trans Mechatron, Vol.7, No.3, pp.296–303 (2002)
3) Liu, H., K, Wu., P, Meusel et al.: Multisensory five-fingered dexterous hand: The DLR/HIT Hand II. Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and System, pp.3692–3697 (2008).
4) Yamano, I., Takemura, K., Maeno, T.: Five-fingered robot hand using ultrasonic motors and elastic elements, Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pp.2673–2678 (2005)
5) Odhner, LU., Jentoft, LP., Claffee, MR. et al.: A compliant, underactuated hand for robust manipulation, Int J Robotics Res, Vol. 33 No.5, pp.736–752 (2014)
6) https://advanced.barrett.com/barretthand.
7) Mikami, K. et al.: High Performance Finger Module for Robot Hands with Pneumatic Cylinder and Parallel Link Mechanism, Advanced Robotics, Vol. 35, p. 1513-1524 (2021)
8) 見上慧.パラレルリンクを用いた空気圧駆動ロボットハンドシステムの研究.Ph.D dissertation, 東京工業大学, 2021.
著者紹介

みかみけい
見上 慧 君
2010年慶應義塾大学大学院前期博士課程修了,株式会社 不二越などを経て2021年ソニーグループ株式会社入社,現在に至る.2022年東京工業大学工学院機械系後期博士課程修了.マニピュレーションやモーションコントロールの研究に従事.日本フルードパワーシステム学会,日本機械学会,日本ロボット学会などの会員.博士(工学),技術士(機械部門).
E-mail: Kei.Mikami(at)sony.com
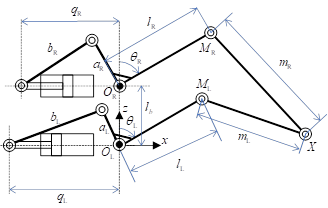 図1 指モジュールの概略構成 |
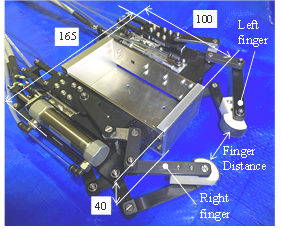 図2 ロボットハンドの外観 |
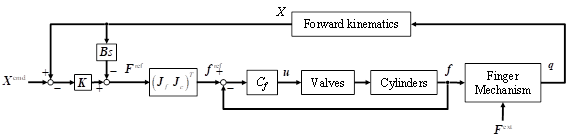 図3 インピーダンス制御のブロック図 |
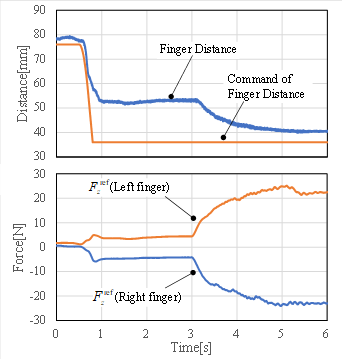 図4 剛性変更実験の結果 |
|

|
| 図5 剛性変更実験の様子 | |
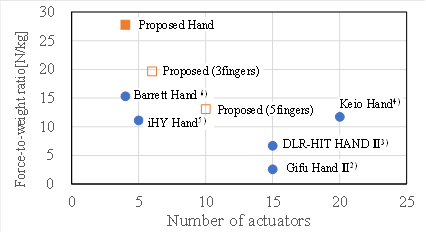 図6 把持力重量比とアクチュエータ数の比較 |
 図7 ケーブル挿入実験 |
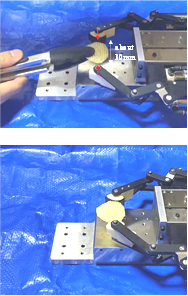 図8 脆性物把持実験 |