1.はじめに
本稿での機能性流体とは,電界印加により粘度が変化する電気粘性流体(ERF),電界印加により流動が生じる電気流体力学(EHD)現象および電界共役流体(ECF),磁界印加により粘度が変化する磁気粘性流体(MRF),磁性流体(MF),磁気混合流体(MCF)を主に指している.また,液体ではなくゴムなどの柔らかい材料に電界や磁界を印加することによる吸着力が変化する機能性ソフトマテリアルの研究も行われている.本稿では,Scopusを利用した機能性流体の各分野の文献数などの分析について述べ,また2023年に公開された各分野の論文をいくつか取り上げて紹介する.
2.研究動向と概要
2.1 文献数分析
Scopusでの論文検索では項目別(出版年,出版物名,著者名,所属機関,国,文献タイプ,分野など)で文献を表示したり,文献数の内訳などを見ることができる1).これを利用して機能性流体分野の2023年までの文献数の推移と2023年に公開された国別の文献数について調査した.図1〜3に結果を示す.いずれの分野においても文献数は年々増加しており,2023年には「ECF, EHD, ERF」では499件,「MCF, MF, MRF」では408件,「機能性ソフトマテリアル」では965件の文献が公開されている.国別を見ると,どの分野でも上位3カ国は中国,アメリカ,インドであるが,4位以降は異なっており,国による研究分野の違いを見ることができる.「ECF, EHD, ERF」では4位以降は上位より,イラン,イギリス,日本,スペイン,韓国,フランス,カナダであった.「MCF, MF, MRF」では4位以降は上位より,パキスタン,サウジアラビア,日本,ドイツ,エジプト,イギリス,イタリアであった.「機能性ソフトマテリアル」では4位以降は上位より,ロシア,ドイツ,イギリス,日本,イタリア,韓国,オーストラリアであった.上記のように日本は機能性流体分野では6〜7位に位置しており,文献2)によれば,全分野における日本の論文数での順位は5位であるため,機能性流体分野における日本の順位が全分野と比べると少し低いことが分かった.
2.2 ECF, EHD, ERF
Smithらは3),筋肉サポート,体温調節,ハプティックフィードバックができるウェアラブル機器を開発する目的で,直径1.6 mm〜2.6 mmの細いポリウレタンチューブの壁内に80 μmの銅線が埋め込まれた連続らせん電極で構成される電荷注入式のEHDポンプを開発した.作動流体はnovec7100である.ポンプの性能は,1 mあたり100 kPaの圧力を発生させることができ,55 ml/min程度の流量を流すことが可能で,また1 kgあたり15 Wの消費電力が必要であった.これによって,圧力源を繊維に直接組み込むことが可能になり,ウェアラブル・ハプティクス,アクティブに動かせる衣服,体温調節などの実現につながる.
Tangらは4),EHDポンプ,アクチュエータ,ヒーリング電気流体,Eスキンを統合した自己保護ソフト流体ロボットを開発した.EHDポンプによってソフトアクチュエータを開発しただけでなく,接着性を有する自己治癒膜を形成できるヒーリング電気流体を合成し,表面のシリコーンゴムの自己治癒を実現している.シリコーンゴム接着剤であるメチルトラセトキシシラン(Methyltracetoxysilane, C6H12O6Si)とジブチルインジラウレート(dibutyltindilaurate C32H64O4Sn)を機能性流体であるセバシン酸ジブチル(DBS)と混ぜることでヒーリング電気流体を開発している.アクチュエータに穴などの傷がつくとこのヒーリング電気流体が表面に出てきて備え付けてあるヒーターで加熱することにより傷が修復される.シリコーンゴム内に張り巡らされた液体金属回路の抵抗によってアクチュエータの状態をセンシングするEスキンを搭載しており,またこのEスキンによって損傷の検出もしている.
2.3 MCF, MF, MRF
Eshaghiは5),超音速気流中における格子状のポケットが配置されたサンドイッチプレートについて,ポケットの一部にMR流体を入れた部分処理した場合の空力弾性安定性と,構造物のフラッター境界を最大化するためのMR処理の最適位置を解析的に検討した.その結果,部分処理したサンドイッチプレートの空力弾性安定性に及ぼすMRポケットの量と位置について,磁場密度を増加させると,MRサンドイッチプレートの臨界空気力学的圧力が増加すること,部分処理したMRサンドイッチプレートの最適設計により,完全処理したものと同等のフラッター抑制能力が得られること,4辺支持されたサンドイッチプレートの臨界空力圧を最大にするMRポケットの最適な位置は,コア層が大きなせん断変形を受ける領域に集まることが報告された.
Yuらは6),MFを潤滑剤と液体バネとして使用する電磁振動発電デバイス(VEH)を提案した.内径が端の方が小さい樽形状の中空シェルに円柱形状の永久磁石を配置し,外側の円柱上下面に配置された平面コイルと円柱側面に配置されたヘリカルコイルによって磁石の振動エネルギーを電気エネルギーに変換するが,永久磁石の両端にMFが封入されており,潤滑剤と液体バネとして機能する.これにより応答周波数を広げ,エネルギー収穫効率を向上させている.7.5 mm往復直線運動による試験では,適切な量のMFは3.25 Hzで出力電圧を173%向上させるが,MFが多すぎると出力電圧が急激に低下することがわかった.ヘリカルコイルは平面コイルよりも高い電圧を発生し,ヘリカルコイルの出力電力密度は8.5 Hzで0.92 mW/cm3であった.また6.4 Hzでの人間による振動試験では,10 Ωの負荷で1.36 mW/cm3の電力を出力した.
2.4 機能性ソフトマテリアル
Takagiらは7),X線透視画像を見ながらカテーテル治療を行うインターベンショナルラジオロジー(IVR)手術のため,高速制御が可能で20ms以内の遅延で力覚をフィードバックできる新しい遠隔操作システムの開発を行った.力覚フィードバックシステムを実現するために,印加電圧の大きさによって抵抗力が発生する新しい電気吸引材料(EAM)デバイスを用いて,EAMは電圧によるON/OFF方式とリニア制御方式の2種類を実装した.マスタ側の直線運動と回転運動は,LANケーブルによるUDP通信でスレーブ装置に転送され,2つのモータによって同じ運動が行われ,スレーブ側のセンサーで検出されたカテーテルやガイドワイヤーの衝突力もマスター装置に伝達される.衝突力が検出された後,マスター装置内のEAMに電圧が印加されるまでの時間は,ON/OFF方式で平均10.33 ms,リニア制御方式で平均15.64 msであり,目指した20 msという要求を達成した.マスターの動きはEAMの抵抗力によって停止し,スレーブの動きもそれに応じて停止した.
3.おわりに
機能性流体分野で数多くの研究発表がなされ,研究活動が国際的に活発に行われていることがわかった.論文数という観点では全分野での日本の順位より本分野での日本の順位が若干低かった.本学会には機能性流体に関する研究委員会(委員長:中野政身教授)が継続して設置されており,私もその委員として日本の国際的プレゼンス向上に向けて興味深くインパクトのある研究成果を出していかなければいけないと思った.
参考文献
1)
Scopus:検索結果の分析を使用するには?.
https://jp.service.elsevier.com/app/answers/detail/a_id/16118/supporthub/scopus/,
参照2024/05/27.
2) サイエンスポータル:https://scienceportal.jst.go.jp/newsflash/20230818_n01/index.html, 参照2024/05/27.
3) Smith, M., Cacucciolo, V., Shea, H.:Fiber pumps for wearable fluidic systems, Science379, p.1327-1332(2023). https://doi.org/10.1126/science.ade8654
4)
Tang, W.,
Zhong, Y., Xu, H., et al.:Self-protection
soft fluidic robots with rapid large-area self-healing capabilities. Nat.
Commun, 14, 6430 (2023).
https://doi.org/10.1038/s41467-023-42214-5
5) Eshaghi, M.:Optimal core design of MR based smart panels subject of flutter instability, Mechanics Based Design of Structures and Machines, 51(1), p.339-358(2023).https://doi.org/10.1080/15397734.2020.1843488
6) Jun, Y., Li, D., Li, S., Xiang, Z., He, Z., Shang, J., Wu, Y., Liu, Y., Li, R.-W.:Electromagnetic vibration energy harvester using magnetic fluid as lubricant and liquid spring, Energy Conversion and Management, 286, 117030 (2023). https://doi.org/10.1016/j.enconman.2023.117030
7) Takagi, R., Osada, K., Hanafusa, A., et al.:Development of a remote-control system for catheterization capable of high-speed force feedback, Int. J. of CARS, 18, p.763-773 (2023). https://doi.org/10.1007/s11548-022-02815-9
著者紹介
 にしかわら まさひと
にしかわら まさひと
西川原 理仁 君
2015年名古屋大学大学院工学研究科航空宇宙工学専攻博士後期課程修了.2015年から豊橋技術科学大学大学院工学研究科機械工学系助教,トゥールーズ流体力学研究所客員研究員,ウースター工科大学客員研究員,名古屋大学高等研究院客員研究員を経て,2024年名古屋大学大学院工学研究科エネルギー理工学専攻准教授,現在に至る.電気流体力学,多孔体気液二相流,熱流体工学関連の研究に従事.日本フルードパワーシステム学会,日本機械学会などの会員.博士(工学).
E-mail: nishikawara(at)nagoya-u.jp
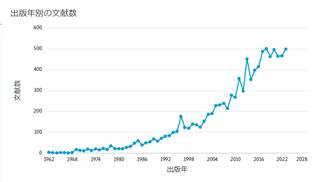 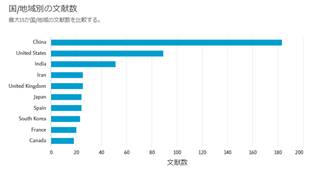 図1 Scopus にて「electrohydrodynamics」or「electro-conjugate fluid」or「electro-rheological fluid」で検索した文献数の推移(左)と国別の2023年出版文献数(右) |
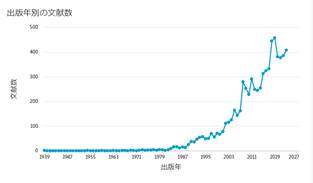 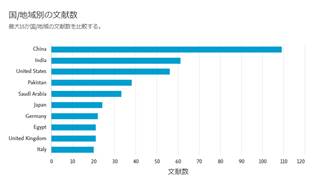 図2 Scopus にて「magnetorheological」or「magnetic fluid」or「magnetic compound fluid」で検索した文献数の推移(左)と国別の2023年出版文献数(右) |
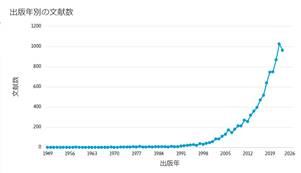 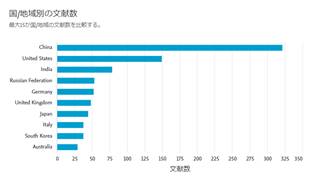 図3 Scopus にて「functional soft material」で検索した文献数の推移(左)と国別の2023年出版文献数(右) |