1.はじめに
この度は,大変栄誉ある2023年度日本フルードパワーシステム学会 学術論文賞をいただき,誠に光栄に存じます.この論文を執筆するにあたり,多くの研究成果を上げてくれた中西優真君(当時 奈良高専専攻科学生,現 オムロン株式会社),木田圭祐君(当時 奈良高専専攻科学生,現 株式会社トクピ製作所)ならびに研究協力いただきました櫟弘明先生(奈良高専教授)には,深く感謝申し上げます.本稿では,受賞論文「Development of Silicone Outer Shell Type Pneumatic Soft Actuator1)」の概要を紹介いたします.
2.背景
空気圧ソフトアクチュエータ2)-5)は,ゴム素材の受動的な柔軟性と,圧力制御による能動的な柔軟性の両方を備えており,人に優しいアクチュエータを容易に実現することができる.しかし,転倒時に身体を保護するサポータ等,装具にソフトゴムアクチュエータを応用する場合,アクチュエータ内圧力制御時においても身体形状に沿ったアクチュエータ初期形状の維持が必要となる.しかし,一般に,ゴム系要素は,加圧時に膨張変形することから,形状を拘束するには,ワイヤ等を用いる必要がある.
そこで,本研究では,ワイヤを用いることなく,加圧時における形状変形の拘束を実現するアクチュエータ(Sponge Core Soft Rubber Actuator(以下,SCSRA))を開発した.本アクチュエータ(以下,要素)は,内部に連泡型発泡ゴム(以下,発泡ゴム)を有し,外殻部にシリコーンゴムを用いている.すなわち,内部の発泡ゴムを身体形状に成形し,外殻部のシリコーンゴムと密着させることで,要素内を加圧しても膨張変形することなく剛性を変化させることが可能となる.
そこで,本論文では,開発したSCSRAに関して,発泡ゴムとシリコーンゴムの接着状態,シリコーンゴム肉厚の違いに関する膨張特性,剛性特性を明らかにしている.
3.SCSRAの特性
3.1 SCSRAの構造
SCSRAの構造を図1に示す.開発した要素は,発泡ゴムを核とし,外殻部にシリコーンゴムを配置している.すなわち,無加圧時においても,発泡ゴム形状により初期成形時の要素形状を維持し,発泡ゴムの材質により所望の固有剛性を設定することができる.
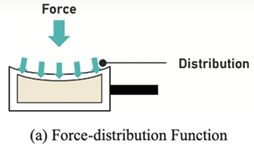
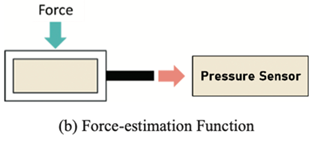
加圧時においては,発泡ゴムとシリコーンゴムの接着状態により,図2に示すように分類することができる.すなわち,図2 (c)のように,発泡ゴムとシリコーンゴムが密着している時,加圧時における要素形状は,発泡ゴムの形状に拘束される.そして,要素内圧力制御により要素の剛性を変化させることができる.また,図2 (d)に示すように,一部の面において発泡ゴムとシリコーンゴムが剥離している時,加圧により,剥離面のみが膨張変形する.さらに,発泡ゴムに弾性材料を用いることにより,外力に対する圧力分散を行うことが可能となる(図2 (a)).そして,図2(b)に示すように,要素内圧測定により,要素に作用する外力を推定することができる.
3.2 SCSRAの基礎特性
SCSRAの基礎特性を明らかにするために,図3の回路を用いる.また,実験に使用する要素形状(シリコーンゴム肉厚値,印加圧力値)を図4に示す.ここで,実験条件は,シリコーンゴム側面肉厚(2,4,6mm) ,
シリコーン上下面肉厚(2,4mm),要素内圧(10,20,30 kPa),印加荷重(100, 200,300,400,500,1000,2000g)である.
発泡ゴムとシリコーンゴムの接着状態の違いによる要素内加圧時の膨張特性を図5に示す.発泡ゴムとシリコーンゴムが密着している場合,要素内加圧による膨張変形がほとんど無く,要素形状が発泡ゴム形状により拘束されることがわかる.また,剥離型の場合,要素内圧増加により膨張変形が生じていることがわかる.具体的には,要素内圧が15kPaの時における剥離型の膨張量は,密着型の約38.2倍となっている.さらに,内圧増大に伴う膨張の増加率は減少していることがわかる.
図6は,要素内圧力変化に対する剛性特性を示している.各内圧に対し,変位と応力の関係は指数関数近似される.ここで,指数関数近似の相関係数は,0.9以上となり,強い正の相関となっている.また,要素内圧力の増大により,剛性が増加していることがわかる.
要素側面肉厚および要素上下面肉厚を変化させた場合の剛性特性を図7,図8に示す.実験結果より,要素側面あるいは上下面肉厚を増加させた場合,要素内圧増大による剛性は減少していることがわかる.これは,シリコーンゴムの剛性が発泡ゴムの剛性よりも小さく,さらに,要素のシリコーンゴム薄肉部位に応力集中が生じることにより,要素全体として剛性が低下すると考えられる.また,上下面肉厚増大時における剛性減少は,直列接続方程式によるバネ剛性の低下も起因していると考えられる.
4.おわりに
身体に直接装着可能な柔軟要素として,発泡ゴムとシリコーンゴムを組み合わせた柔軟ゴム要素を開発した.そして,核である発泡ゴムとシリコーンゴムの状態(密着あるいは剥離)による膨張および剛性特性を明らかにし,身体装着用要素としての可能性を示した.特に,発泡ゴムとシリコーンゴムが密着している場合,要素内を加圧することにより剛性のみを変化させることができることから,転倒時の骨折から寝たきりになることを防止する大腿骨頸部の保護用サポータに応用することもできる.さらに,義手・義足などの装具と身体患部との接触部位への適用も可能になると考える.また,靴中敷きに応用することにより,歩行パターンの推定を行うこともできる6).
参考文献
1) Hayakawa, Y., Kida, K., NAKANISHI, Y. and ICHII, H.: Development of Silicone Outer Shell Type Pneumatic Soft Actuator, JFPS International Journal of Fluid Power System, Vol.15, Issue.2,p.40-45, (2022)
2) Noritsugu, T.: Pneumatic Soft Actuator and Human Friendly Mechanism, Journal of Robotics and Mechatronics, Vol.21, Issue.7, p.722-726 (2003)
3) Gorissen, B., Volder, MD., et al.: Theoretical and Experimental Analysis of Pneumatic Balloon Microactuators, Sensors and Actuators A, Vol.168, p.58-65 (2011)
4) Gorissen, B., Chiskiro, T., et al.: Flexible Pneumatic Twisting Actuators and their Application to Tilting Micromirror, Sensors and Actuators A, Vol.216, p.426-431 (2014)
5) Suzumori, K.: Flexible Microactuator, Transactions of the Japan society of mechanical engineers C, Vol.55, Issue.518, p.2574-2552 (1989)
6) Hayakawa, Y., Kimata, Y. and Kida, K.: Study on Human Behavior Classification by using High-Performance Shoes Equipped with Pneumatic Actuators, Journal of Robotics and Mechatronics, Vol.32, Issue.5, p.1-9 (2020)
 著者紹介
著者紹介
はやかわ やすひろ
早川 恭弘 君
1984年立命館大学理工学研究科博士前期課程機械工学専攻修了.2023年独立行政法人国立高等専門学校機構奈良工業高等専門学校電子制御工学科名誉教授.社会福祉法人天寿会理事.福祉工学,介護ロボットの研究に従事.日本フルードパワーシステム学会などの会員.博士(工学)
E-mail: hayakawa(at)ctrl.nara-k.ac.jp
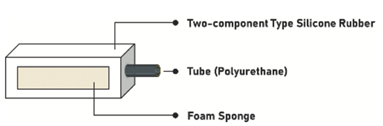 図1 SCSRAの構造 |
|
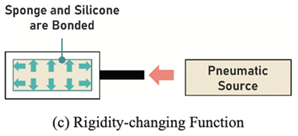 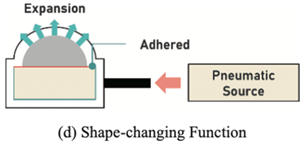 図2 SCSRAの機能 |
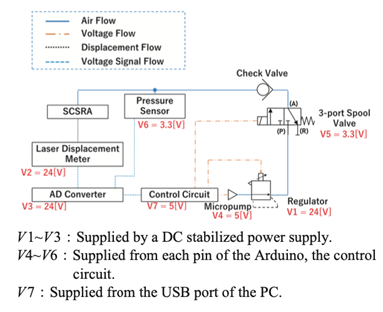 図3 実験回路 |
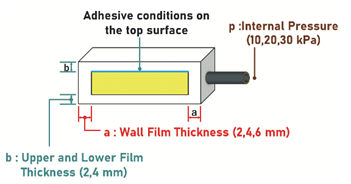 図4 SCSRA各部変数 |
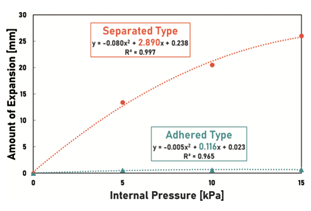 図5 SCSRAの膨張特性 |
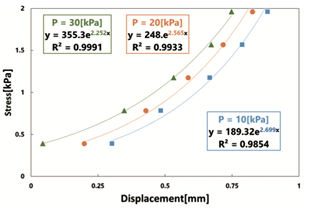 図6 内部圧力による剛性特性 |
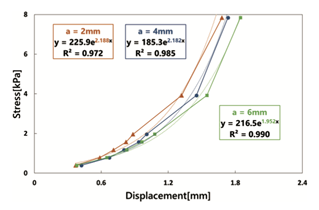 図7 側面肉厚の違いによる剛性特性 |
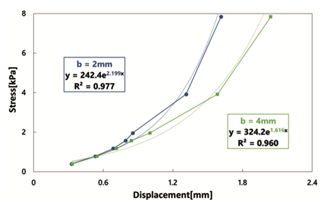 図8 上下面肉厚の違いによる剛性特性 |