1.はじめに
この度は,「湾曲型ラバーアクチュエータを用いたソフトロボットハンド」に対して,日本フルードパワーシステム学会において高く評価いただき技術開発賞を受賞できたことを大変名誉に思うとともに,選出いただけたことに感謝を申し上げる.
弊社では長年にわたりMcKibben型ラバーアクチュエータの研究開発を進めてきた.空気圧駆動の収縮型に始まり油圧駆動の超高出力収縮型1),一方向湾曲型2),双方向湾曲型3)とMcKibben型ラバーアクチュエータをベースとして新たな構造のアクチュエータを提案するとともに耐久性を含めて工業的に使用可能なデバイスに仕上げてきた.このような活動の中でこの度,空気圧駆動の湾曲型ラバーアクチュエータを用いたソフトロボットハンドを製品化することができた.本製品は湾曲型ラバーアクチュエータが単独で人の指のように変形することを活用したきわめてシンプルな構造のロボットハンドである.さらに印加圧力に応じて微小な力から大きな力まで変化させることができることから,壊れやすい柔らかい対象物も硬く重い対象物も同じハンドで把持可能であるとともに湾曲型ラバーアクチュエータのバネ特性を活かして不定形の物体の把持も得意としている.
本稿ではソフトロボットハンドを構成する湾曲型ラバーアクチュエータの特徴を紹介するとともにソフトロボットハンドについて解説する.
2.技術内容
2.1 湾曲型ラバーアクチュエータ
McKibben型をベースとした一方向湾曲型ラバーアクチュエータの構造を図1に示す.ゴムチューブとスリーブの間に板バネを1枚挿入することで加圧時に板バネを背中側として湾曲する.金属製の板バネを用いることで大きな収縮力に対しても座屈することなく湾曲することができるため大きな湾曲力を得ることができる.そのため空気圧だけでなく油圧を用いて高圧駆動する超高出力の湾曲型も可能である4).湾曲型ラバーアクチュエータは加圧により自らが湾曲することで,リンク機構などを必要とすることなく,あたかもアクチュエータ自身が指のような動作をするのでシンプルな構造のロボットハンドを構成できる.
2.2 ソフトロボットハンドの構成
図2に湾曲型ラバーアクチュエータを用いたソフトロボットハンドを示す.写真はカバーがかけられており構造が分かりにくいが,4本の湾曲型ラバーアクチュエータが周方向に等間隔に配置されており,加圧することでそれぞれが中心に向かって湾曲する(右図).4本のアクチュエータとそれらを固定する手のひらのみでハンドを構成することができるためきわめて容易に設計が可能で設計自由度も高い.本製品では4本の湾曲型ラバーアクチュエータを中心に向けて配置しているが,アクチュエータの本数,長さ,固定位置や向きを変えることで容易に希望の形状のハンドを構成することができる.
2.3 ソフトロボットハンドの特徴
本ソフトロボットハンドは印加する圧力により把持力を制御できることから,柔らかく壊れやすい対象を把持する場合は低い圧力に調整し,硬く重い対象物を把持する場合には高い圧力を印加することで1つのハンドで幅広い硬さや重さの対象物を把持することが可能である.一例として0.10~0.15MPaの圧力でゆで卵を潰さずに把持することと0.60MPa印加することで5kgの鉄球を把持することの両立ができている5).一方で湾曲型ラバーアクチュエータは湾曲方向へのバネ要素を持っているため把持対象物の形状が均一でなくてもアクチュエータ自身が把持対象物の形状に倣う形で安定した把持を実現できる.さらにハンドが硬い床や壁に接触した場合にもアクチュエータ自身のバネ特性により衝撃を吸収できるため,床や壁の破損を防ぐことが出来るとともにロボットが過負荷で停止することも回避できる.
2.4 ソフトロボットハンドの今後の展開
図3は双方向湾曲型ラバーアクチュエータを指としたロボットハンドのコンセプトモデルである.1本の一方向湾曲型ラバーアクチュエータに対して等間隔に5本の双方湾曲型ラバーアクチュエータを固定した構造となっている.5本の双方向湾曲型を一直線状に配置することも(左図),円周上に配置することも(右図)可能であるとともに,それぞれの双方向湾曲型を自在に湾曲させてさまざまな形態での物体把持が可能となっている.アクチュエータでありながら指としての構造体を兼ねる湾曲型ラバーアクチュエータを活用したソフトロボットハンドは,容易にさまざまなバリエーションを実現可能であるので今後も目的に合わせたさまざまな応用を進めていきたいと考えている.
3.終わりに
湾曲型ラバーアクチュエータを指として用いたソフトロボットハンドは,きわめてシンプルにハンドを構成できること,ソフトアクチュエータならではの柔軟性,静止摩擦が小さいことによる微小な力制御,高圧の印加が可能なことによる大きな把持力など,さまざまな特徴を有するユニークな製品である.弊社ではMcKibben型をベースとしたさまざまなタイプのラバーアクチュエータを開発している.今回技術開発賞を受賞したソフトロボットハンドにとどまらず,ソフトパワーデバイスとしてさまざまな用途にMcKibben型ラバーアクチュエータを活用していくことで,これからもフルードパワー技術の発展に貢献していきたい.
参考文献
1) 大野信吾:油圧駆動の高出力ゴム人工筋肉,計測と制御,Vol.57,No.11,p.799-802(2018)
2) 大野信吾ほか:湾曲型ゴム人工筋肉の提案とその特性評価,第20回計測自動制御学会システムインテグレーション部門講演会(SI2019)
3) 大野信吾ほか:双方向湾曲型ゴム人工筋肉の提案とその特性評価,第24回計測自動制御学会システムインテグレーション部門講演会(SI2023)
4) 大野信吾ほか:油圧駆動ハイパワー湾曲型ゴム人工筋肉の特性評価,第21 回計測自動制御学会システムインテグレーション部門講演会(SI2020)
5) 大野信吾:McKibben型ラバーアクチュエータを活用したソフトロボットハンド,2023年日本フルードパワーシステム学会春季講演会講演論文集,p.22-24(2023)
著者紹介
 おおの しんご
おおの しんご
大野 信吾 君
1995年東京工業大学制御工学専攻博士前期課程修了.同年株式会社ブリヂストンに入社.2008年青山学院大学大学院理工学研究科博士後期課程修了.ブリヂストンでは電子ペーパーをはじめとする種々の技術開発を行い,現在はMcKibben型ラバーアクチュエータを中心とした油空圧機器の研究開発に従事.日本フルードパワーシステム学会,日本機械学会などの会員.博士(理学).
E-mail: shingo.oono(at)bridgestone.com
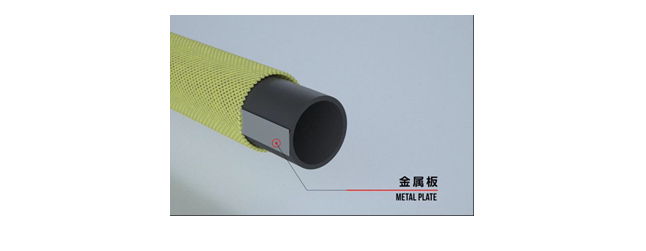 図1 湾曲型ラバーアクチュエータの構造 |
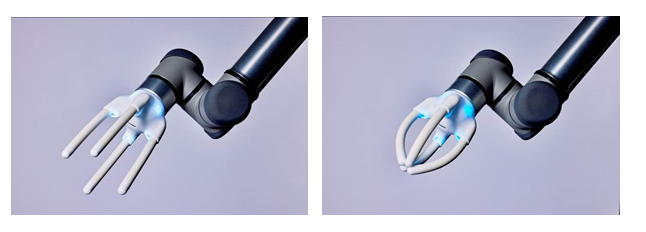 図2 湾曲型ラバーアクチュエータを用いたソフトロボットハンド |
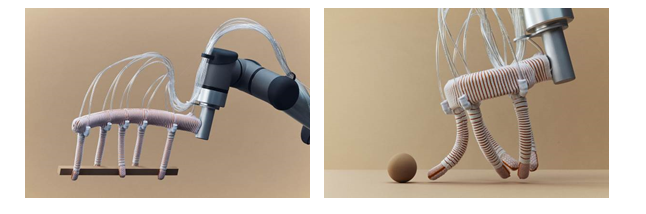 図3 双方向湾曲型ラバーアクチュエータを用いたコンセプトハンド |