1.はじめに
このたびは,「空気圧駆動による力覚フィードバック機能を有する手術支援ロボット」について,2024年度技術開発賞を賜り,誠に光栄に存ずるとともに関係者の皆様に厚く感謝の意を表する.本学会には,著者が学生の頃から,当技術に関する研究発表や紹介を多数させていただいており,改めて深謝申し上げる次第である.以下では,当技術の概要および開発の経緯と現状について紹介する.
2.当該技術について
2.1 背景
手術支援ロボットは,その登場から普及の一途を辿り,多くの手術でその利用が第一選択となりつつある.一方,従来のロボット手術では内視鏡画像からの視覚情報のみに基づいてロボット操作を行っているが,より直感的で安全な手技を行うために,手術中に生じる反力の力覚提示が当初から望まれていた.このような力覚フィードバックより,過剰な力の抑制による生体組織の挫滅防止や,ラーニングカーブ短縮などが期待されている.その実現のためには手技中の反力を検出する必要があるが,力センサを手術器具の先端近傍に搭載することは,洗浄,滅菌,エネルギーデバイスの併用やコストなど実運用の観点から望ましくない.
2.2 技術概要
このような背景から,著者らは,患者体内に挿入されるロボット先端部の関節に空気圧駆動を採用することで,力センサを用いることなく空気の圧力値から外力を検出する手術支援ロボットシステムの開発を行ってきた1)〜5).サーボバルブを用いた高速な圧力制御により,手術手技に必要な精密かつ高応答な動作を実現するとともに,外力を外乱として検知し操作側へ伝達するシステムを構築した.
本技術を製品化した手術支援ロボットの全体外観を図1に示す.本システムは,手術台の脇に配置されるペイシェントカート(図1(a))と,これを離れた位置から操作するためのサージョンコンソール(図1(b))から構成される.ペイシェントカートには3本のロボットアームが備わり,中央のアームには内視鏡,左右のアームにはロボットのエンドエフェクタに相当するインストゥルメントが装着され術者の両手としての役割を担う.インストゥルメントは,図2に示すようにその先端に把持動作と屈曲を含む3自由度を有し,ロボットアーム本体側のインストゥルメントドライバと着脱可能な構造となっている.インストゥルメントドライバには3本の空気圧シリンダや位置センサが内蔵され,装着されたインストゥルメントの関節を位置制御する.インストゥルメント先端が受ける反力は,図3のように空気圧シリンダのバックドライバビリティを利用して圧力情報から推定する.術者はサージョンコンソールのハンドコントローラを介して操作し,ロボット先端の把持力を感じ取ることができる.
3.研究開始から現在までの歩み
本技術に関する研究は,2003年に筆者が旧東京工業大学大学院修士課程在籍時に香川利春教授(現東京工業大学名誉教授,空気圧工学研究所長),川嶋健嗣助教授(現東京大学教授)の指導のもとで,修士論文研究として開始した.本研究について著者が初めて学会発表したのも本学会であり1),当該発表に対しては最優秀講演賞もいただくことができ,その後の研究活動において大きな励みとなった.
その後,2024年統合にした旧東京医科歯科大学との医工連携の下,試作機の改良を重ねてきた(図4).当初,動物実験などにおいては力覚提示機能の有効性検証以前に,実際の手術支援ロボットとしての最低限の機能を発揮させるところから苦戦を強いられてきたが,研究試作機としての完成度が高まっていく中で,これを研究として終わらせずに実用化,社会実装したいという思いから,川嶋教授主導の下2014年に大学発スタートアップ,リバーフィールド株式会社を設立した.
本タイプの手術支援ロボットはリスクレベルの高い高度管理医療機器として分類され,計画から設計,製造体制の確立までリスクマネジメントを含む厳格な品質管理が求められる.このような医療機器開発は経営資源の乏しいスタートアップ企業においては非常にハードルの高いものであるが,多数の苦難,紆余曲折を経て2022年5月に薬事申請を行い,翌2023年7月に手術用ロボット手術ユニット「Saroaサージカルシステム」として胸部外科(心臓外科を除く),一般消化器外科,泌尿器科,婦人科の4診療科において薬事承認を取得した.その後,複数の協力病院施設において,図5に示すような臨床使用を開始し,コマーシャルベースでの導入も経て,これまでに各診療科合わせて累計250症例以上を実施している.今後は導入先の拡大および臨床実績の積み上げを行いながら,新機能の実装などアップデートを継続的に実施していく.
4.おわりに
本稿では,空気圧駆動による力覚フィードバック機能を有する手術支援ロボットの概要および開発の経緯と現状を紹介した.技術内容については概要に留めたが,より詳細については本学会誌Vol.55, No.5にも解説記事5)を掲載頂いているので,そちらも参照されたい.研究当初からの基本原理を変えることなく,医療機器製品に実装し臨床使用にまで至ったことは大変感慨深い.一方で,まだそのような研究をしているのかという見方も一部されてきたが,ここまで地道に粘り強く続けてきたことが,上記成果および本受賞につながったものと思う.これまでご指導,ご協力いただいた研究室関係者ならびに協力医療機関の皆様,リバーフィールド社員に深く感謝申し上げる.
参考文献
1) 只野耕太郎, 川嶋健嗣. 空気圧シリンダを用いたマスタースレーブシステムのバイラテラル制御, 平成16年秋季フルードパワーシステム講演会講演論文集, pp. 134-136, 2004.
2) 只野耕太郎, 川嶋健嗣. 空気圧サーボを用いた多自由度鉗子システムのバイラテラル制御, 日本コンピュータ外科学会論文誌, Vol. 7, No. 1, pp. 25-31, 2005.
3) Kotaro Tadano, Kenji Kawashima. Development of a Master–Slave System with Force-Sensing Abilities using Pneumatic Actuators for Laparoscopic Surgery, Advanced Robotics, Vol. 24, No. 12, pp. 1763-1783, 2010.
4) Koki Aizawa, Daisuke Haraguchi, Kotaro Tadano. Load Reduction Control on Tool-Insertion Port for Laparoscopic Surgical Robot Using Semi-Active Joints, Journal of Robotics and Mechatronics, Vol. 32, No. 5, pp. 1000-1009, Oct. 2020.
5) 只野耕太郎:空気圧駆動と電動駆動を併用した手術支援ロボット,日本フルードパワーシステム学会誌,Vol.55,No.5,p.203-206, 2024
著者紹介

ただの こうたろう
只野 耕太郎 君
2007年9月東京工業大学大学院総合理工学研究科博士後期課程修了.翌年4月東京工業大学助教.2013年6月准教授.2014年リバーフィールド株式会社取締役兼務,2020年4月より代表取締役社長.日本フルードパワーシステム学会,日本機械学会,日本ロボット学会,日本コンピュータ外科学会などの会員.博士(工学).
E-mail: k-tadano.rfc(at)riverfieldinc.com
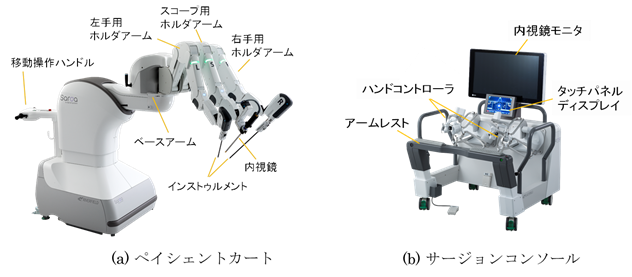 図1 製品化した手術支援ロボット |
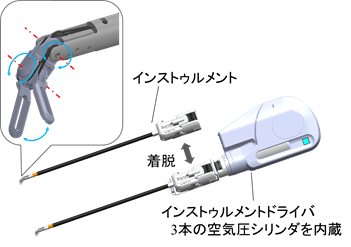 図2 インストゥルメントとインストゥルメントドライバ |
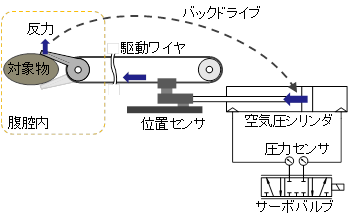 図3 空気圧シリンダのバックドライバビリティを用いた外力検出 |
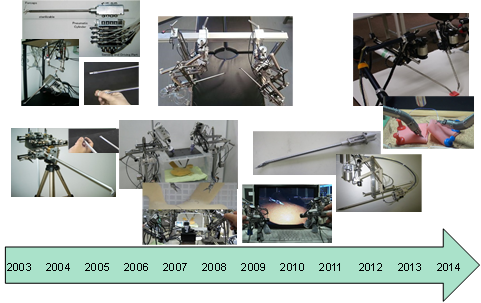 図4 研究試作機の変遷 |
 図5 臨床使用の様子 |