4.おわりに
名誉員の拝命にあたり,これまでの研究活動を振り返った.小職の研究は,流体素子,空気圧シリンダなどの基礎研究から始まり,介護予防および介護機器への空気圧利用を行なってきた.人間との接触を伴う作業に対し,人間親和性の観点から空気圧は非常に有効である.特に,空気圧アクチュエータは,実験室内でも試作開発することが可能であり,今後の更なる開発が期待される.
最後に,研究活動を通して多くの方々との出会いがあり,親交を深めさせていただいた.学会運営にご尽力くださった関係者の皆様,事務局の皆様及びフルードパワーに係わる研究者の皆様に,改めて心から感謝申し上げます.
参考文献
1) 宮田,早川,花房:空気圧シリンダの定速駆動に関する研究,日本油空圧学会誌, Vol.20, No.3, p.240-246 (1989)
2) Pandian, Hayakawa, Kanazawa, Kamoyama, Kawamura: Practical Design of a Sliding Mode Controller for Pneumatic Actuators, ASME J. Dynamic Systems, Measurement, and Control, Vol.119, No.4, p.666–674 (1997)
3) Pandian,武村,早川,川村:空気圧シリンダのための適応モデル規範型スライディングモード制御の実用的な設計法,日本油空圧学会論文集,Vol.31,No.4,p.107-114(2000)
4) 武村,早川,川村:ベーン形空気圧モータのモデリングとスライディングモード制御,日本機械学会論文集(C編),Vol.66,No.652,p.3939-3946(2000)
5) 武村,Pandian,早川,川村:ハイブリッド型空気圧・電気駆動モータの設計と制御,日本機械学会論文集(C編), Vol.68, No.665, p.117-124(2002)
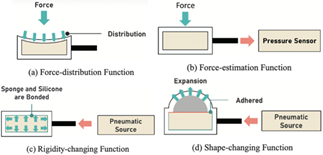
6) 川村,清水,玉井,早川:Hexahedron Rubber Actuator (HRA) の開発,日本ロボット学会誌,Vol.16,No.3,p.369-375(1998)
7) 早川,川村: 空気圧ベローズアクチュエータの基本性能と力センサーへの応用, 日本ロボット学会誌,Vol.11,No.5,p.756-764(1993)
8) 早川,川村: 拮抗形空気圧ベローズアクチュエータの基本性能, 日本機械学会論文集,Vol.61,No.581,C,p.115-123(1995)
9) Hayakawa and Kawamura: Pneumatic Bellows Actuator with Force Sensing Ability and Its Application to a Pneumatic Robot, Journal of Robotics and Mechatronics, Vol.7, No.6, p.474-482 (1995)
10) 早川,川村,後藤,永井:力センシング機能を有する空気圧ベローズによるロボットマニピュレータ用回転駆動機構の開発,日本ロボット学会,Vol.14,No.2,p.271-278(1996)
11) Hayakawa, Pandian and Kawamura: Development of an Autonomous Transfer Machine using Pneumatic Actuators, JSME International Journal, Series C, Vol.47, No.2, p.602-609 (2004)
12) 早川,森下,相血,津田:空気圧シリコン外殻型発泡ゴムアクチュエータの開発,日本機械学会論文集(C編),Vol.70,No.690,p.433-439(2004)
13) Hayakawa and Morishita: Development of a Silicon Outer Fence Mold Actuator with Human Compatibility, Proceedings of the 2004 IEEE International Conference on Robotics & Automation, p.4059-4064 (2004)
14) Hayakawa, Morishita, Hata and Hirota: Development of a Body Protection Orthosis by Using Silicon Outer Fence Mold Actuator, Proceedings of the 2004 IEEE International Conference on Control Applications, p.1147-1152 (2004)
15) Hayakawa, Pandian: Development of a Hybrid Element by using Sponge Core Soft Rubber Actuator
Proceedings of the 2005 IEEE International Conference on Robotics and Automation, p.540 (2005)
16) Nakanishi, Hayakawa, Kida and ICHII: Development of Silicone Outer Shell Type Pneumatic Soft Actuator, Proceedings of the 11th JFPS International Symposium on Fluid Power (2020)
17) Hayakawa, Nakanishi and Ichii: Development of Silicone Outer Shell Type Pneumatic Soft Actuator, JFPS International Journal of Fluid Power System, Vol.15, No.2, p.40-45 (2022)
18) Hayakawa and Ikeda: Study on a New Type of Sole for a Health Care Implement, Proceedings of IASTED International Conference on Robotics and Applications, Germany, 563-018 (2007)
19) Hayakawa, Hikita, Tsujioka and Nishida: Study on a High Performance Insole with Human Compatibility, Proceedings of the 7th JFPS International Symposium on Fluid Power TOYAMA (2008)
20) Hayakawa1 and Nishida: Study on a High Performance Shoes by using Silicon Rubber Elements with Human Compatibility, Proceedings of the World Congress on Medical Physics and Biomedical Engineering, p.1-4 (2009)
21) Hayakawa: Study on a High Performance Insole with Human Compatibility, Proceedings of 5th European Conference of the International Federation for Medical and Biological Engineering, p.810-813 (2011)
22) Hayakawa: Development of Walking Training System using High-Performance Shoes, Proceeding of 6th European Conference of the International Federation for Medical and Biological Engineering (2014)
23) Hayakawa, Kawanaka, Kanezaki, Minami and Doi: Study on Presentation System for Walking Training using High-Performance Shoes, Journal of Robotics and Mechatronics, Vol.27, No.6, p.706-713 (2015)
24) 早川,林:福祉の現場から 人間親和性を有する介護ロボット及び歩行訓練システムの開発,地域ケアリング,Vol.18,No.8,p.77-82(2016)
25) Hayakawa and Nagata: Study on Walking Training System for Using High-Performance Shoes with Human Compatibility, Proceedings of the 10th JFPS International Symposium on Fluid Power Fukuoka (2017)
26) Hayakawa and Kimata: Study on high-performance shoes for walking training system with human compatibility, Proceedings of the 15th International Conference on Fluid Control, Measurements and Visualization (2019)
27) Hayakawa and Kimata, and Kida: Study on Human Behavior Classification by using High-Performance Shoes equipped with Pneumatic Actuators,Journal of Robotics and Mechatronics, Vol.32, No.5, p.947-957 (2020)
28) Hayakawa, Kida, Nakanishi, Ichii, and Hirota: Development and Application of Silicone Outer Shell Type Pneumatic Soft Actuators, Journal of Robotics and Mechatronics, Vol.34, No.2, p.444-453 (2022)
著者紹介

はやかわ やすひろ
早川 恭弘 君
1984年立命館大学理工学研究科博士前期課程機械工学専攻修了.2023年独立行政法人国立高等専門学校機構奈良工業高等専門学校電子制御工学科名誉教授.社会福祉法人天寿会理事.福祉工学,介護ロボットの研究に従事.日本フルードパワーシステム学会などの会員.博士(工学)
E-mail: hayakawa(at)ctrl.nara-k.ac.jp
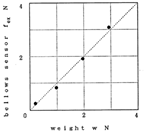
 図1 外圧型ベローズアクチュエータの基礎 |
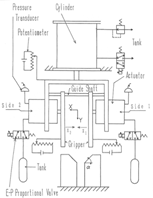
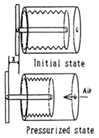 図2外圧型ベローズアクチュエータ |
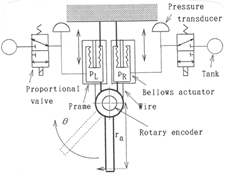
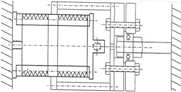 図3 内圧型ベローズアクチュエータ |
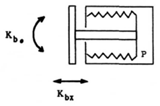 図4 ベローズアクチュエータ挙動 |
|
|
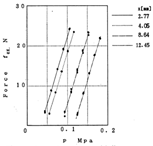
| 図5 ベローズアクチュエータの力推定性能 | |
 (a) ロボットグリッパー |
 (b) ロボットアーム |
 (c)自律型移乗機 |
|||
| 図6 ベローズアクチュエータ応用 | |||||
|
|
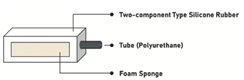
| 図7 スポンジ・コア・ソフトラバーアクチュエータ (SCSRA) | |

|

|
| 図8 SCSRAを用いた安定歩行訓練システム | |
 (a) 歩行訓練システム |
 (b) 認知症判断用中敷き |
 (c) 認知症予防・抑制用中敷き |
|||
| 図9 認知症予防・判断・抑制のための歩行訓練システム | |||||